⚙ Usage
🚀 Basics
🌐 Initialization of Maps objects
Maps objects.epsg=4326, e.g. lon/lat), simply use:from eomaps import Maps
m = Maps(crs=4326, layer="first layer", figsize=(10, 5))
m.add_feature.preset.coastline()
crsrepresents the projection used for plottinglayerrepresents the name of the layer associated with the Maps-object (see below)all additional keyword arguments are forwarded to the creation of the matplotlib-figure (e.g.:
figsize,frameon,edgecoloretc).
Possible ways for specifying the crs for plotting are:
If you provide an integer, it is identified as an epsg-code (e.g.
4326,3035, etc.)4326 defaults to PlateCarree projection
All other CRS usable for plotting are accessible via
Maps.CRS, e.g.:crs=Maps.CRS.Orthographic(),crs=Maps.CRS.GOOGLE_MERCATORorcrs=Maps.CRS.Equi7_EU. (Maps.CRSis just an accessor forcartopy.crs.For a full list of available projections see: Cartopy projections)
▤ Layers
Maps object represents a collection of features on the assigned layer.Once you have created your first Maps object, you can:
Create additional
Mapsobjects on the same layer by usingm2 = m.new_layer()If no explicit layer-name is provided,
m2will use the same layer asmThis is especially useful if you want to plot multiple datasets on the same layer
Create a NEW layer named
"my_layer"by usingm2 = m.new_layer("my_layer")
m = Maps() # same as `m = Maps(layer="base")`
m.add_feature.preset.coastline() # add some coastlines
m_ocean = m.new_layer(layer="ocean") # create a new layer named "ocean"
m_ocean.add_feature.preset.ocean() # features on this layer will only be visible if the "ocean" layer is visible!
m2 = m_ocean.new_layer() # "m2" is just another Maps-object on the same layer as "m_ocean"!
m2.set_data(data=[.14,.25,.38],
x=[1,2,3], y=[3,5,7],
crs=4326)
m2.set_shape.ellipses(n=100)
m2.plot_map()
m.show_layer("ocean") # show the "ocean" layer
m.util.layer_selector() # get a utility widget to quickly switch between existing layers
The “all” layer
"all" layer.You can add features and callbacks to the all layer via:
using the shortcut
m.all. ...creating a dedicated
Mapsobject viam_all = Maps(layer="all")orm_all = m.new_layer("all")using the “layer” kwarg of functions e.g.
m.plot_map(layer="all")
m = Maps()
m.all.add_feature.preset.coastline() # add some coastlines to ALL layers of the map
m_ocean = m.new_layer(layer="ocean") # create a new layer named "ocean"
m_ocean.add_feature.preset.ocean()
m.show_layer("ocean") # show the "ocean" layer (note that it has coastlines as well!)
Combining multiple layers
"|" character (e.g. "layer1|layer2").The layer will then always show all features of "layer1 and layer2.
NOTE: The vertical stacking of features is controlled by the
zorderproperty, not by the order of the layers!
m = Maps(layer="first")
m.add_feature.preset.ocean(alpha=0.75, zorder=2)
m2 = m.new_layer("second") # create a new layer and plot some data
m2.set_data(data=[.14,.25,.38],
x=[1,2,3], y=[3,5,7],
crs=4326)
m2.set_shape.ellipses(n=100)
m2.plot_map(zorder=1) # plot the data "below" the ocean
m.show_layer("first|second") # show all features of the two layers
# you can even create Maps-objects representing combined layers!
# (the features will only be visible if all sub-layers are visible)
m_combined = m.new_layer("first|second")
m_combined.add_annotation(xy=(2, 5), xy_crs=4326, text="some text")
The base-class for generating plots with EOmaps. |
|
Create a new Maps-object that shares the same plot-axes. |
|
Get a Maps-object on the "all" layer. |
|
Display the selected layer on the map. |
|
Make the layer of this Maps-object visible. |
|
Fetch (and cache) the layers of a map. |
🔵 Setting the data and plot-shape
To assign a dataset to a Maps object, use m.set_data(...).
Set the properties of the dataset you want to plot. |
A dataset is fully specified by setting the following properties:
data: The data-valuesx,y: The coordinates of the provided datacrs: The coordinate-reference-system of the provided coordinatesparameter(optional): The parameter nameencoding(optional): The encoding of the datacpos,cpos_radius(optional): the pixel offset
The following data-types are accepted as input:
pandas DataFrames
|
from eomaps import Maps
import pandas as pd
df = pd.DataFrame(dict(lon=[1,2,3], lat=[2,5,4], data=[12, 43, 2]))
m = Maps()
m.set_data(df, x="lon", y="lat", crs=4326, parameter="data")
m.plot_map()
|
pandas Series
|
from eomaps import Maps
import pandas as pd
x, y, data = pd.Series([1,2,3]), pd.Series([2, 5, 4]), pd.Series([12, 43, 2])
m = Maps()
m.set_data(data, x=x, y=y, crs=4326, parameter="param_name")
m.plot_map()
|
1D or 2D data and coordinates
|
from eomaps import Maps
import numpy as np
x, y = np.mgrid[-20:20, -40:40]
data = x + y
m = Maps()
m.set_data(data=data, x=x, y=y, crs=4326, parameter="param_name")
m.plot_map()
|
1D coordinates and 2D data
|
from eomaps import Maps
import numpy as np
x = np.linspace(10, 50, 100)
y = np.linspace(10, 50, 50)
data = np.random.normal(size=(100, 50))
m = Maps()
m.set_data(data=data, x=x, y=y, crs=4326, parameter="param_name")
m.plot_map()
|
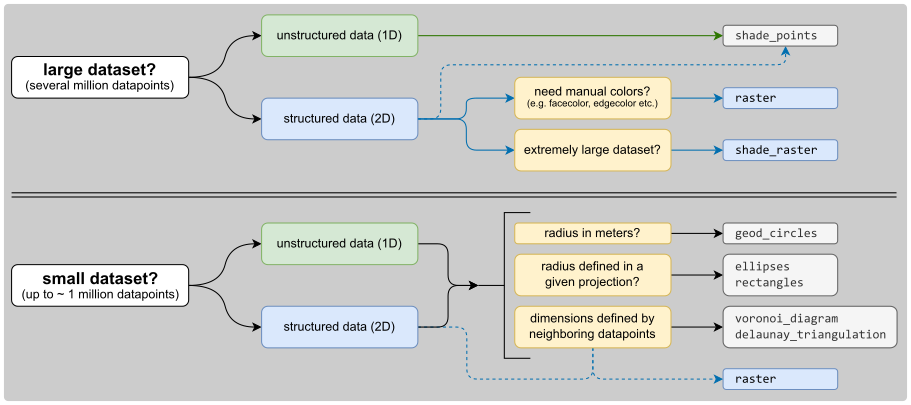
To specify how the data is represented on the map, you have to set the “plot-shape” via m.set_shape.
Note
Set the plot-shape to represent the data-points. |
Possible shapes that work nicely for datasets with up to ~500 000 data-points:
Draw geodesic circles with a radius defined in meters. |
|
Draw projected ellipses with dimensions defined in units of a given crs. |
|
Draw projected rectangles with fixed dimensions (and possibly curved edges) |
|
Draw a Voronoi-Diagram of the data. |
|
Draw a Delaunay-Triangulation of the data. |
Possible shapes that work nicely for up to a few million data-points:
Draw the data as a rectangular raster. |
While raster can still be used for datasets with a few million datapoints, for extremely large datasets
(> 10 million datapoints) it is recommended to use “shading” to greatly speed-up plotting.
If shading is used, a dynamic averaging of the data based on the screen-resolution and the
currently visible plot-extent is performed (resampling based on the mean-value is used by default).
Possible shapes that can be used to quickly generate a plot for extremely large datasets are:
Shade the data as infinitesimal points (>> usable for very large datasets!). |
|
Shade the data as a rectangular raster (>> usable for very large datasets!). |
from eomaps import Maps
data, x, y = [.3,.64,.2,.5,1], [1,2,3,4,5], [2,5,3,7,5]
m = Maps() # create a Maps-object
m.set_data(data, x, y) # assign some data to the Maps-object
m.set_shape.rectangles(radius=1, # represent the datapoints as 1x1 degree rectangles
radius_crs=4326) # (in epsg=4326 projection)
m.plot_map(cmap="viridis", zorder=1) # plot the data
m2 = m.new_layer() # create a new Maps-object on the same layer
m2.set_data(data, x, y) # assign another dataset to the new Maps object
m2.set_shape.geod_circles(radius=50000, # draw geodetic circles with 50km radius
n=100) # use 100 intermediate points to represent the shape
m2.plot_map(ec="k", cmap="Reds", # plot the data
zorder=2, set_extent=False) # (and avoid resetting the plot-extent)
Note
The “shade”-shapes require the additional datashader dependency!
You can install it via:
mamba install -c conda-forge datashader
What’s used by default?
By default, the plot-shape is assigned based on the associated dataset.
For datasets with less than 500 000 pixels,
m.set_shape.ellipses()is used.- For larger 2D datasets
m.set_shape.shade_raster()is used… andm.set_shape.shade_points()is used for the rest.
To get an overview of the existing shapes and their main use-cases, here’s a simple decision-tree:
🗺 Plot the map and save it
If you want to plot a map based on a dataset, first set the data and then
call m.plot_map().
Any additional keyword-arguments passed to m.plot_map() are forwarded to the actual
plot-command for the selected shape.
Some useful arguments that are supported by most shapes (except “shade”-shapes) are:
“cmap” : the colormap to use
“vmin”, “vmax” : the range of values used when assigning the colors
“fc” or “facecolor” : the face-color of the shapes
“ec” or “edgecolor” : the edge-color of the shapes
“lw” or “linewidth” : the linewidth of the shapes
“alpha” : the alpha-transparency
By default, the plot-extent of the axis is adjusted to the extent of the data.
To keep the extent as-is, use m.plot_map(set_extent=False)
from eomaps import Maps
m = Maps()
m.add_feature.preset.coastline(lw=0.5)
m.set_data([1,2,3,4,5], [10,20,40,60,70], [10,20,50,70,30], crs=4326)
m.set_shape.geod_circles(radius=7e5)
m.plot_map(cmap="viridis", ec="b", lw=1.5, alpha=0.85, set_extent=False)
To adjust the margins of the subplots, use m.subplots_adjust, e.g.:
from eomaps import Maps
m = Maps()
m.subplots_adjust(left=0.1, right=0.9, bottom=0.05, top=0.95)
Update the subplot parameters of the grid. |
You can then continue to add 🌈 Colorbars (with a histogram), 🏕 Annotations, Markers, Lines, Logos, etc., 📏 Scalebars, 🧭 Compass (or North Arrow), 🛰 WebMap layers, 🌵 NaturalEarth features or 💠 GeoDataFrames to the map, or you can start to ✏️ Draw Shapes on the map, add 🦜 Utility widgets and 🛸 Callbacks - make the map interactive!.
Once the map is ready, an image of the map can be saved at any time by using:
m.savefig( "snapshot1.png", dpi=300, ... )
Actually generate the map-plot based on the data provided as m.data and the specifications defined in "data_specs" and "classify_specs". |
|
Save the current figure. |
🎨 Customizing the plot
All arguments to customize the appearance of a dataset are passed to m.plot_map(...).
In general, the colors assigned to the shapes are specified by
selecting a colormap (
cmap)either a name of a pre-defined
matplotlibcolormap (e.g."viridis","RdYlBu"etc.)or a general
matplotlibcolormap object (see matplotlib-docs for more details)
(optionally) setting appropriate data-limits via
vminandvmax.vminandvmaxset the range of data-values that are mapped to the colorbar-colorsAny values outside this range will get the colormaps
overandundercolors assigned.
m = Maps()
m.set_data(...)
m.plot_map(cmap="viridis", vmin=0, vmax=1)
Colors can also be set manually by providing one of the following arguments to m.plot_map(...):
to set both facecolor AND edgecolor use
color=...to set the facecolor use
fc=...orfacecolor=...to set the edgecolor use
ec=...oredgecolor=...
Note
Manual color specifications do not work with the
shade_rasterandshade_pointsshapes!Providing manual colors will override the colors assigned by the
cmap!The
colorbardoes not represent manually defined colors!
Uniform colors
To apply a uniform color to all datapoints, you can use matpltolib’s color-names or pass an RGB or RGBA tuple.
m.plot_map(fc="r")
m.plot_map(fc="orange")
m.plot_map(fc=(1, 0, 0.5))
m.plot_map(fc=(1, 0, 0.5, .25))
# for grayscale use a string of a number between 0 and 1
m.plot_map(fc="0.3")
Explicit colors
To explicitly color each datapoint with a pre-defined color, simply provide a list or array of the aforementioned types.
m.plot_map(fc=["r", "g", "orange"])
# for grayscale use a string of a number between 0 and 1
m.plot_map(fc=[".1", ".2", "0.3"])
# or use RGB / RGBA tuples
m.plot_map(fc=[(1, 0, 0.5), (.3, .4, .5), (1, 1, 0)])
m.plot_map(fc=[(1, 0, 0.5, .25), (1, 0, 0.5, .75), (.1, .2, 0.5, .5)])
RGB composites
To create an RGB or RGBA composite from 3 (or 4) datasets, pass the datasets as tuple:
the datasets must have the same size as the coordinate arrays!
the datasets must be scaled between 0 and 1
# if you pass a tuple of 3 or 4 arrays, they will be used to set the
# RGB (or RGBA) colors of the shapes
m.plot_map(fc=(<R-array>, <G-array>, <B-array>))
m.plot_map(fc=(<R-array>, <G-array>, <B-array>, <A-array>))
# you can fix individual color channels by passing a list with 1 element
m.plot_map(fc=(<R-array>, [0.12345], <B-array>, <A-array>))
📊 Data classification
EOmaps provides an interface for mapclassify to classify datasets prior to plotting.
There are 2 (synonymous) ways to assign a classification-scheme:
m.set_classify_specs(scheme=..., ...): set classification scheme by providing name and relevant parameters.m.set_classify.<SCHEME>(...): use autocompletion to get available classification schemes (with appropriate docstrings)The big advantage of this method is that it supports autocompletion (once the Maps-object has been instantiated) and provides relevant docstrings to get additional information on the classification schemes.
Available classifier names are also accessible via Maps.CLASSIFIERS.
The preferred way for assigning a classification-scheme to a Maps object is:
m = Maps()
m.set_data(...)
m.set_shape.ellipses(...)
m.set_classify.Quantiles(k=5)
m.plot_map()
Alternatively, one can also use m.set_classify_specs to assign a classification scheme:
m = Maps()
m.set_data(...)
m.set_shape.ellipses(...)
m.set_classify_specs(scheme="Quantiles", k=5)
m.classify_specs.k = 10 # alternative way for setting classify-specs
m.plot_map()
Set classification specifications for the data. |
Currently available classification-schemes are (see mapclassify for details):
BoxPlot (hinge)
EqualInterval (k)
FisherJenks (k)
FisherJenksSampled (k, pct, truncate)
HeadTailBreaks ()
JenksCaspall (k)
JenksCaspallForced (k)
JenksCaspallSampled (k, pct)
MaxP (k, initial)
MaximumBreaks (k, mindiff)
NaturalBreaks (k, initial)
Quantiles (k)
Percentiles (pct)
StdMean (multiples)
UserDefined (bins)
🍱 Adding Maps to existing figures
It is possible to add (one or more) EOmaps maps to existing matplotlib figures.
To create a new map in an existing figure, simply provide the
matplotlib.Figureinstance viaMaps(f=<the figure instance>)The initial position of the map can be set via the
axargument, e.g.:Maps(ax=<...>).NOTE: Since the effective size of the Map is dependent on the current zoom-region, the position always represents the maximal area that can be occupied by the map!
The syntax is similar to matplotlibs f.add_subplot() or f.add_axes, allowing one of the following options:
Grid positioning
To position the map in a (virtual) grid, one of the following options are possible:
Three integers
(nrows, ncols, index).The map will take the
indexposition on a grid withnrowsrows andncolscolumns.indexstarts at 1 in the upper left corner and increases to the right.indexcan also be a two-tuple specifying the (first, last) indices (1-based, and including last) of the map, e.g., Maps(ax=(3, 1, (1, 2))) makes a map that spans the upper 2/3 of the figure.
import matplotlib.pyplot as plt
from eomaps import Maps
f = plt.figure(figsize=(10, 7)) # initialize the Figure
f.add_subplot(2, 2, 1) # add a normal axes
m = Maps(f=f, ax=(2, 2, (1, 2))) # add a EOmaps map
f = plt.figure(figsize=(10, 7)) # initialize the Figure
f.add_subplot(3, 1, 1) # add a normal axes
m = Maps(f=f, ax=(3, 1, (2, 3))) # add a EOmaps map
A 3-digit integer.
The digits are interpreted as if given separately as three single-digit integers, i.e. Maps(ax=235) is the same as Maps(ax=(2, 3, 5)).
Note that this can only be used if there are no more than 9 subplots.
import matplotlib.pyplot as plt
from eomaps import Maps
f = plt.figure(figsize=(10, 7)) # initialize the Figure
f.add_subplot(211) # add a normal axes
m = Maps(f=f, ax=212) # add a EOmaps map
An already existing
matplotlib.AxesinstanceNOTE: this MUST be a cartopy-
GeoAxeswith the same projection as the Maps-object!
import matplotlib.pyplot as plt
import cartopy
from eomaps import Maps
f = plt.figure(figsize=(10, 7)) # initialize the Figure
ax = f.add_subplot(projection=cartopy.crs.Mollweide())
m = Maps(ax=ax)
A
matplotlib.SubplotSpec
import matplotlib.pyplot as plt
from matplotlib.gridspec import GridSpec
from eomaps import Maps
gs = GridSpec(2, 2) # setup the GridSpec
f = plt.figure(figsize=(10, 7)) # initialize the Figure
m = Maps(f=f, ax=gs[0,0]) # add a EOmaps map
Absolute positioning
To set the absolute position of the map, provide a list of 4 floats representing (left, bottom, width, height).
The absolute position of the map expressed in relative figure coordinates (e.g. ranging from 0 to 1)
import matplotlib.pyplot as plt
from eomaps import Maps
f = plt.figure(figsize=(10, 7)) # initialize the Figure
f.add_axes((.2, .5, .4, .4)) # add a normal axes
m = Maps(f=f, ax=(.2, 0, .4, .5)) # add a EOmaps map
Dynamic updates of plots
As soon as a Maps-object is attached to a figure, EOmaps will handle re-drawing of the figure.
Therefore dynamically updated artists must be added to the “blit-manager” (m.BM) to ensure
that they are correctly updated.
use
m.BM.add_artist(artist, layer=...)if the artist should be re-drawn on any change in the figureuse
m.BM.add_bg_artist(artist, layer=...)if the artist should only be re-drawn if the extent of the map changes
In general, it should be sufficient to simply add the axes-object as artist via m.BM.add_artist(...)
This will ensure that all artists on the axes are updated.
Here’s a more complete example to show how it works:
import matplotlib.pyplot as plt
from eomaps import Maps
# create a matplotlib figure
f = plt.figure(figsize=(10, 7))
# add a "normal" plot spanning the top rows of a 2x2 grid
ax = f.add_subplot(2, 2, (1, 2))
ax.plot([10, 20, 30, 40, 50], [10, 20, 30, 40, 50])
# put a map on the 3rd axis of a 2x2 grid (bottom left)
m = Maps(f=f, ax=(2, 2, 3))
m.ax.set_title("click me!")
m.add_wms.OpenStreetMap.add_layer.default()
m.cb.click.attach.mark(radius=20, fc="none", ec="r", lw=2)
# attach a callback that plots markers on the axis if you click on the map
def cb(pos, **kwargs):
ax.plot(*pos, marker="o")
m.cb.click.attach(cb)
# Since we want to dynamically update the plot on the axis, it must be
# added to the BlitManager to ensure that the artists are properly updated.
# (EOmaps handles interactive re-drawing of the figure)
m.BM.add_artist(ax, layer=m.layer)
# put a map on the 4th axis of a 2x2 grid (bottom right)
m2 = Maps(f=f, ax=(2, 2, 4), crs=Maps.CRS.Mollweide())
m2.add_feature.preset.coastline()
m2.add_feature.preset.ocean()
m2.cb.click.attach.mark(radius=20, fc="none", ec="r", lw=2, n=200)
# share click events on the 2 maps
m.cb.click.share_events(m2)
𝄜 MapsGrid objects
MapsGrid objects can be used to create (and manage) multiple maps in one figure.
A MapsGrid creates a grid of Maps objects (and/or ordinary matpltolib axes),
and provides convenience-functions to perform actions on all maps of the figure.
from eomaps import MapsGrid
mg = MapsGrid(r=2, c=2, crs=..., layer=..., ... )
# you can then access the individual Maps-objects via:
mg.m_0_0
mg.m_0_1
mg.m_1_0
mg.m_1_1
m2 = mg.m_0_0.new_layer("newlayer")
...
# there are many convenience-functions to perform actions on all Maps-objects:
mg.add_feature.preset.coastline()
mg.add_compass()
...
# to perform more complex actions on all Maps-objects, simply loop over the MapsGrid object
for m in mg:
...
# set the margins of the plot-grid
mg.subplots_adjust(left=0.1, right=0.9, bottom=0.05, top=0.95, hspace=0.1, wspace=0.05)
Make sure to checkout the 🏗️ Layout Editor which greatly simplifies the arrangement of multiple axes within a figure!
Custom grids and mixed axes
Fully customized grid-definitions can be specified by providing m_inits and/or ax_inits dictionaries
of the following structure:
The keys of the dictionary are used to identify the objects
The values of the dictionary are used to identify the position of the associated axes
The position can be either an integer
N, a tuple of integers or slices(row, col)Axes that span over multiple rows or columns, can be specified via
slice(start, stop)
dict(
name1 = N # position the axis at the Nth grid cell (counting firs)
name2 = (row, col), # position the axis at the (row, col) grid-cell
name3 = (row, slice(col_start, col_end)) # span the axis over multiple columns
name4 = (slice(row_start, row_end), col) # span the axis over multiple rows
)
m_initsis used to initializeMapsobjectsax_initsis used to initialize ordinarymatplotlibaxes
The individual Maps-objects and matpltolib-Axes are then accessible via:
mg = MapsGrid(2, 3,
m_inits=dict(left=(0, 0), right=(0, 2)),
ax_inits=dict(someplot=(1, slice(0, 3)))
)
mg.m_left # the Maps object with the name "left"
mg.m_right # the Maps object with the name "right"
mg.ax_someplot # the ordinary matplotlib-axis with the name "someplot"
❗ NOTE: if m_inits and/or ax_inits are provided, ONLY the explicitly defined objects are initialized!
The initialization of the axes is based on matplotlib’s GridSpec functionality. All additional keyword-arguments (
width_ratios, height_ratios, etc.) are passed to the initialization of theGridSpecobject.To specify unique
crsfor eachMapsobject, provide a dictionary ofcrsspecifications.
from eomaps import MapsGrid
# initialize a grid with 2 Maps objects and 1 ordinary matplotlib axes
mgrid = MapsGrid(2, 2,
m_inits=dict(top_row=(0, slice(0, 2)),
bottom_left=(1, 0)),
crs=dict(top_row=4326,
bottom_left=3857),
ax_inits=dict(bottom_right=(1, 1)),
width_ratios=(1, 2),
height_ratios=(2, 1))
mgrid.m_top_row # a map extending over the entire top-row of the grid (in epsg=4326)
mgrid.m_bottom_left # a map in the bottom left corner of the grid (in epsg=3857)
mgrid.ax_bottom_right # an ordinary matplotlib axes in the bottom right corner of the grid
Initialize a grid of Maps objects |
|
Join axis limits between all Maps objects of the grid (only possible if all maps share the same crs!) |
|
Share click events between all Maps objects of the grid |
|
Share pick events between all Maps objects of the grid |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
A collection of open-access WebMap services that can be added to the maps. |
|
Interface to the feature-layers provided by NaturalEarth. |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
🧱 Naming conventions and autocompletion
The goal of EOmaps is to provide a comprehensive, yet easy-to-use interface.
To avoid having to remember a lot of names, a concise naming-convention is applied so that autocompletion can quickly narrow-down the search to relevant functions and properties.
Once a few basics keywords have been remembered, finding the right functions and properties should be quick and easy.
Note
EOmaps works best in conjunction with “dynamic autocompletion”, e.g. by using an interactive
console where you instantiate a Maps object first and then access dynamically updated properties
and docstrings on the object.
To clarify:
First, execute
m = Maps()in an interactive consolethen (inside the console, not inside the editor!) use autocompletion on
m.to get autocompletion for dynamically updated attributes.
For example the following accessors only work properly after the Maps object has been initialized:
- m.add_wms: browse available WebMap services
- m.set_classify: browse available classification schemes
The following list provides an overview of the naming-conventions used within EOmaps:
Add features to a map - “m.add_”
All functions that add features to a map start with add_, e.g.:
- m.add_feature, m.add_wms, m.add_annotation, m.add_marker, m.add_gdf, …
WebMap services (e.g. m.add_wms) are fetched dynamically from the respective APIs.
Therefore the structure can vary from one WMS to another.
The used convention is the following:
- You can navigate into the structure of the API by using “dot-access” continuously
- once you reach a level that provides layers that can be added to the map, the .add_layer. directive will be visible
- any <LAYER> returned by .add_layer.<LAYER> can be added to the map by simply calling it, e.g.:
m.add_wms.OpenStreetMap.add_layer.default()
m.add_wms.OpenStreetMap.OSM_mundialis.add_layer.OSM_WMS()
Set data specifications - “m.set_”
All functions that set properties of the associated dataset start with set_, e.g.:
- m.set_data, m.set_classify, m.set_shape, …
Create new Maps-objects - “m.new_”
Actions that result in a new Maps objects start with new_.
- m.new_layer, m.new_inset_map, …
Callbacks - “m.cb.”
Everything related to callbacks is grouped under the cb accessor.
use
m.cb.<METHOD>.attach.<CALLBACK>()to attach pre-defined callbacks<METHOD>hereby can be one ofclick,pickorkeypress(but there’s no need to remember since autocompletion will do the job!).
use
m.cb.<METHOD>.attach(custom_cb)to attach a custom callback
🧰 Companion Widget
Starting with v5.0, EOmaps comes with an awesome companion widget that greatly simplifies using interactive capabilities.
To activate the widget, press
won the keyboard while the mouse is over the map you want to edit.If multiple maps are present in the figure, a green border indicates the map that is currently targeted by the widget.
Once the widget is initialized, pressing
wwill show/hide the widget.
Note
The companion-widget is written in PyQt5 and therefore only works when using
the matplotlib qt5agg backend (matplotlibs default if QT5 is installed)!
To manually set the backend, execute the following lines at the start of your script:
import matplotlib
matplotlib.use("qt5agg")
The main purpose of the widget is to provide easy-access to features that usually don’t need to go into a python-script, such as:
Compare layers (e.g. overlay multiple layers)
Switch between existing layers (or combine existing layers)
Add simple click or pick callbacks
Quickly create new WebMap layers (or add WebMap services to existing layers)
Draw shapes, add Annotations and NaturalEarth features to the map
Quick-edit existing map-artists (show/hide, remove or set basic properties color, linewidth, zorder)
Save the current state of the map to a file (at the desired dpi setting)
A basic interface to plot data from files (with drag-and-drop support) (csv, NetCDF, GeoTIFF, shapefile)
🛸 Callbacks - make the map interactive!
Callbacks are used to execute functions when you click on the map.
They can be attached to a map via the .attach directive:
m = Maps()
...
m.cb.< METHOD >.attach.< CALLBACK >( **kwargs )
< METHOD > defines the way how callbacks are executed.
Callbacks that are executed if you click anywhere on the Map. |
|
Callbacks that select the nearest datapoint(s) if you click on the map. |
|
Callbacks that are executed if you press a key on the keyboard. |
|
Callbacks that are executed if you move the mouse without holding down a button. |
< CALLBACK > indicates the action you want to assign to the event.
There are many pre-defined callbacks, but it is also possible to define custom
functions and attach them to the map (see below).
from eomaps import Maps
import numpy as np
x, y = np.mgrid[-45:45, 20:60]
m = Maps(Maps.CRS.Orthographic())
m.all.add_feature.preset.coastline()
m.set_data(data=x+y**2, x=x, y=y, crs=4326)
m.plot_map(pick_distance=10)
m2 = m.new_layer(copy_data_specs=True, layer="second_layer")
m2.plot_map(cmap="tab10")
# get an annotation if you RIGHT-click anywhere on the map
m.cb.click.attach.annotate(xytext=(-60, -60),
bbox=dict(boxstyle="round", fc="r"))
# pick the nearest datapoint if you click on the MIDDLE mouse button
m.cb.pick.attach.annotate(button=2)
m.cb.pick.attach.mark(buffer=1, permanent=False, fc="none", ec="r", button=2)
m.cb.pick.attach.mark(buffer=4, permanent=False, fc="none", ec="r", button=2)
# peek at the second layer if you LEFT-click on the map
m.cb.click.attach.peek_layer("second_layer", how=.25, button=3)
|
|
Note
Callbacks are only executed if the layer of the associated Maps object is actually visible!
(This assures that pick-callbacks always refer to the visible dataset.)
To define callbacks that are executed independent of the visible layer, attach it to the "all"
layer using something like m.all.cb.click.attach.annotate().
In addition, each callback-container supports the following useful methods:
Attach custom or pre-defined callbacks to the map. |
|
Remove previously attached callbacks from the map. |
|
Accessor for objects generated/retrieved by callbacks. |
|
Define keys on the keyboard that should be treated as “sticky modifiers”. |
Share callback-events between this Maps-object and all other Maps-objects |
|
Forward callback-events from this Maps-object to other Maps-objects |
|
Make an artist temporary (remove it from the map at the next event) |
🍬 Pre-defined callbacks
Pre-defined click, pick and move callbacks
Callbacks that can be used with m.cb.click, m.cb.pick and m.cb.move:
Swipe between data- or WebMap layers or peek a layers through a rectangle. |
|
Add a basic text-annotation to the plot at the position where the map was clicked. |
|
Draw markers at the location where the map was clicked. |
|
Print details on the clicked pixel to the console |
Callbacks that can be used with m.cb.click and m.cb.pick:
Successively collect return-values in a dict accessible via m.cb.[click/pick].get.picked_vals. |
|
Remove all temporary and permanent annotations from the plot |
|
Remove all temporary and permanent annotations from the plot. |
Callbacks that can be used only with m.cb.pick:
Load objects from a given database using the ID of the picked pixel. |
|
Temporarily highlite the picked geometry of a GeoDataFrame. |
Pre-defined keypress callbacks
Callbacks that can be used with m.cb.keypress
Change the default layer of the map. |
|
Fetch (and cache) layers of a map. |
👽 Custom callbacks
Custom callback functions can be attached to the map via m.cb.< METHOD >.attach(< CALLBACK FUNCTION >, **kwargs):
def some_callback(custom_kwarg, **kwargs):
print("the value of 'custom_kwarg' is", custom_kwarg)
print("the position of the clicked pixel in plot-coordinates", kwargs["pos"])
print("the dataset-index of the nearest datapoint", kwargs["ID"])
print("data-value of the nearest datapoint", kwargs["val"])
print("the color of the nearest datapoint", kwargs["val_color"])
print("the numerical index of the nearest datapoint", kwargs["ind"])
...
# attaching custom callbacks works completely similar for "click", "pick" and "keypress"!
m = Maps()
...
m.cb.pick.attach(some_callback, double_click=False, button=1, custom_kwarg=1)
m.cb.click.attach(some_callback, double_click=False, button=2, custom_kwarg=2)
m.cb.keypress.attach(some_callback, key="x", custom_kwarg=3)
Note
Custom callbacks must always accept the following keyword arguments:
pos, ID, val, val_color, ind
❗ for click callbacks the kwargs
ID,valandval_colorare set toNone!❗ for keypress callbacks the kwargs
ID,val,val_color,indandposare set toNone!
For better readability it is recommended that you “unpack” used arguments like this:
def cb(ID, val, **kwargs):
print(f"the ID is {ID} and the value is {val}")
👾 Using modifiers for pick- click- and move callbacks
It is possible to trigger pick, click or move callbacks only if a specific key is pressed on the keyboard.
This is achieved by specifying a modifier when attaching a callback, e.g.:
m = Maps()
m.add_feature.preset.coastline()
# a callback that is executed if NO modifier is pressed
m.cb.move.attach.mark(radius=5)
# a callback that is executed if 1 is pressed while moving the mouse
m.cb.move.attach.mark(modifier="1", radius=10, fc="r", ec="g")
# a callback that is executed if 2 is pressed while moving the mouse
m.cb.move.attach.mark(modifier="2", radius=15, fc="none", ec="b")
To keep the last pressed modifier active until a new modifier is activated,
you can make it “sticky” by using m.cb.move.set_sticky_modifiers().
“Sticky modifiers” remain activated until
A new (sticky) modifier is activated
ctrl + <current (sticky) modifier>is pressedescapeis pressed
NOTE: sticky modifiers are defined for each callback method individually! (e.g. sticky modifiers are unique for click, pick and move callbacks)
m = Maps()
m.add_feature.preset.coastline()
# a callback that is executed if 1 is pressed while clicking on the map
m.cb.click.attach.annotate(modifier="1", text="modifier 1 active")
# a callback that is executed if 2 is pressed while clicking on the map
m.cb.click.attach.annotate(modifier="2", text="modifier 2 active")
# make the modifiers 1 and 2 sticky for click callbacks
m.cb.click.set_sticky_modifiers("1", "2")
# note that the modifier 1 is not sticky for move callbacks!
# m.cb.move.set_sticky_modifiers("1") # (uncomment to make it sticky)
m.cb.move.attach.mark(radius=5)
m.cb.move.attach.mark(modifier="1", radius=5, fc="r")
🍭 Picking N nearest neighbours
[requires EOmaps >= 5.4]
By default pick-callbacks pick the nearest datapoint with respect to the click position.
To customize the picking-behavior, use m.cb.pick.set_props(). The following properties can be adjusted:
n: The (maximum) number of datapoints to pick within the search-circle.search_radius: The radius of a circle (in units of the plot-crs) that is used to identify the nearest neighbours.pick_relative_to_closest: Set the center of the search-circle.If True, the nearest neighbours are searched relative to the closest identified datapoint.
If False, the nearest neighbours are searched relative to the click position.
consecutive_pick: Pick datapoints individually or alltogether.If True, callbacks are executed for each picked point individually
If False, callbacks are executed only once and get lists of all picked values as input-arguments.
Set the picker-properties (number of picked points, max. |
from eomaps import Maps
import numpy as np
# create some random data
x, y = np.mgrid[-30:67, -12:50]
data = np.random.randint(0, 100, x.shape)
# a callback to indicate the search-radius
def indicate_search_radius(m, pos, *args, **kwargs):
art = m.add_marker(
xy=(np.atleast_1d(pos[0])[0],
np.atleast_1d(pos[1])[0]),
shape="ellipses", radius=m.tree.d, radius_crs="out",
n=100, fc="none", ec="k", lw=2)
m.cb.pick.add_temporary_artist(art)
# a callback to set the number of picked neighbours
def pick_n_neighbours(m, n, **kwargs):
m.cb.pick.set_props(n=n)
m = Maps()
m.add_feature.preset.coastline()
m.set_data(data, x, y)
m.plot_map()
m.cb.pick.set_props(n=50, search_radius=10, pick_relative_to_closest=True)
m.cb.pick.attach.annotate()
m.cb.pick.attach.mark(fc="none", ec="r")
m.cb.pick.attach(indicate_search_radius, m=m)
for key, n in (("1", 1), ("2", 9), ("3", 50), ("4", 500)):
m.cb.keypress.attach(pick_n_neighbours, key=key, m=m, n=n)
|
|
📍 Picking a dataset without plotting it first
It is possible to attach pick callbacks to a Maps object without plotting the data first
by using m.make_dataset_pickable().
m = Maps()
m.add_feature.preset.coastline()
m.set_data(... the dataset ...)
m.make_dataset_pickable()
# now it's possible to attach pick-callbacks even though the data is still "invisible"
m.cb.pick.attach.annotate()
Note
Using m.make_dataset_pickable() is ONLY necessary if you want to use pick
callbacks without actually plotting the data! Otherwise a call to m.plot_map()
is sufficient!
Make the associated dataset pickable without plotting it first. |
🛰 WebMap layers
WebMap services (TS/WMS/WMTS) can be attached to the map via:
m.add_wms.attach.< SERVICE > ... .add_layer.< LAYER >(...)
< SERVICE > hereby specifies the pre-defined WebMap service you want to add,
and < LAYER > indicates the actual layer-name.
m = Maps(Maps.CRS.GOOGLE_MERCATOR) # (the native crs of the service)
m.add_wms.OpenStreetMap.add_layer.default()
A collection of open-access WebMap services that can be added to the maps. |
Note
It is highly recommended (and sometimes even required) to use the native crs of the WebMap service in order to avoid re-projecting the images (which degrades image quality and sometimes takes quite a lot of time to finish…)
most services come either in
epsg=4326or inMaps.CRS.GOOGLE_MERCATORprojection
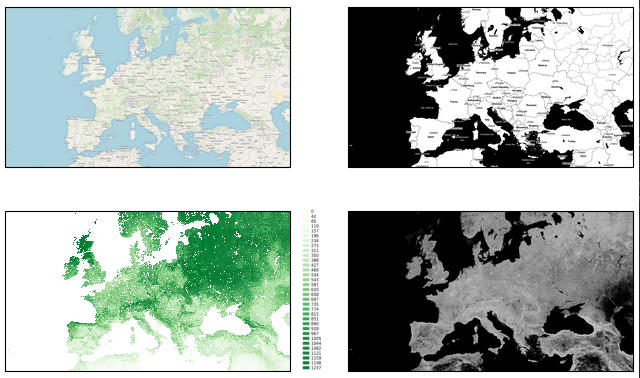
from eomaps import Maps, MapsGrid
mg = MapsGrid(crs=Maps.CRS.GOOGLE_MERCATOR)
mg.join_limits()
mg.m_0_0.add_wms.OpenStreetMap.add_layer.default()
mg.m_0_1.add_wms.OpenStreetMap.add_layer.stamen_toner()
mg.m_1_1.add_wms.S1GBM.add_layer.vv()
# ... for more advanced
layer = mg.m_1_0.add_wms.ISRIC_SoilGrids.nitrogen.add_layer.nitrogen_0_5cm_mean
layer.set_extent_to_bbox() # set the extent according to the boundingBox
layer.info # the "info" property provides useful information on the layer
layer() # call the layer to add it to the map
layer.add_legend() # if a legend is provided, you can add it to the map!
|
|
Pre-defined WebMap services:
Global:
OpenStreetMap WebMap layers https://wiki.openstreetmap.org/wiki/WMS |
|
ESA Worldwide land cover mapping https://esa-worldcover.org/en |
|
NASA Global Imagery Browse Services (GIBS) https://wiki.earthdata.nasa.gov/display/GIBS/ |
|
Interface to the ISRIC SoilGrids database. |
|
European Environment Agency Discomap services https://discomap.eea.europa.eu/Index/ |
|
Interface to the ERSI ArcGIS REST Services Directory http://services.arcgisonline.com/arcgis/rest/services |
|
Sentinel-1 Global Backscatter Model https://researchdata.tuwien.ac.at/records/n2d1v-gqb91 |
|
Global cloudless Sentinel-2 maps, crafted by EOX https://s2maps.eu/ |
|
Global ocean & land terrain models https://www.gebco.net/ |
|
Copernicus Atmosphere Monitoring Service (Global and European) https://atmosphere.copernicus.eu/ |
|
Basemaps hosted by DLR's EOC Geoservice https://geoservice.dlr.de |
Services specific for Austria (Europe)
Basemap for Austria https://basemap.at/ |
|
Basemaps for the city of Vienna (Austria) https://www.wien.gv.at |
Note
Services might be nested directory structures!
The actual layer is always added via the add_layer directive.
m.add_wms.<...>. ... .<...>.add_layer.<LAYER NAME>()
Some of the services dynamically fetch the structure via HTML-requests. Therefore it can take a short moment before autocompletion is capable of showing you the available options! A list of available layers from a sub-folder can be fetched via:
m.add_wms.<...>. ... .<LAYER NAME>.layers
Using custom WebMap services
It is also possible to use custom WMS/WMTS/XYZ services.
(see docstring of m.add_wms.get_service for more details and examples)
Get a object that can be used to add WMS, WMTS or XYZ services based on a GetCapabilities-link or a link to a ArcGIS REST API |
m = Maps()
# define the service
service = m.add_wms.get_service(<... link to GetCapabilities.xml ...>,
service_type="wms",
res_API=False,
maxzoom=19)
# once the service is defined, you can use it just like the pre-defined ones
service.layers # >> get a list of all layers provided by the service
# select one of the layers
layer = service.add_layer. ... .< LAYER >
layer.info # >> get some additional infos for the selected layer
layer.set_extent_to_bbox() # >> set the map-extent to the bbox of the layer
# call the layer to add it to the map
# (optionally providing additional kwargs for fetching map-tiles)
layer(...)
Setting date, style and other WebMap properties
Some WebMap services allow passing additional arguments to set properties such as the date or the style of the map. To pass additional arguments to a WebMap service, simply provide them when when calling the layer, e.g.:
m = Maps()
m.add_wms.< SERVICE >. ... .add_layer.< LAYER >(time=..., styles=[...], ...)
To show an example, here’s how to fetch multiple timestamps for the UV-index of the Copernicus Airquality service. (provided by https://atmosphere.copernicus.eu/)
from eomaps import Maps
import pandas as pd
m = Maps(layer="all", figsize=(8, 4))
m.subplots_adjust(left=0.05, right=0.95)
m.all.add_feature.preset.coastline()
m.add_logo()
layer = m.add_wms.CAMS.add_layer.composition_uvindex_clearsky
timepos = layer.wms_layer.timepositions # available time-positions
all_styles = list(layer.wms_layer.styles) # available styles
# create a list of timestamps to fetch
start, stop, freq = timepos[1].split(r"/")
times = pd.date_range(start, stop, freq=freq.replace("PT", ""))
times = times.strftime("%Y-%m-%dT%H:%M:%SZ")
style = all_styles[0] # use the first available style
for time in times[:6]:
# call the layer to add it to the map
layer(time=time,
styles=[style], # provide a list with 1 entry here
layer=time # put each WebMap on an individual layer
)
layer.add_legend() # add a legend for the WebMap service
# add a "slider" and a "selector" widget
m.util.layer_selector(ncol=3, loc="upper center", fontsize=6, labelspacing=1.3)
m.util.layer_slider()
# attach a callback to fetch all layers if you press l on the keyboard
cid = m.all.cb.keypress.attach.fetch_layers(key="l")
# fetch all layers so that they are cached and switching layers is fast
m.fetch_layers()
m.show_layer(times[0]) # make the first timestamp visible
|
|
🌵 NaturalEarth features
Feature-layers provided by NaturalEarth can be directly added to the map via m.add_feature.
Interface to the feature-layers provided by NaturalEarth. |
The call-signature is: m.add_feature.< CATEGORY >.< FEATURE >(...):
< CATEGORY > specifies the general category of the feature, e.g.:
cultural: cultural features (e.g. countries, states etc.)physical: physical features (e.g. coastlines, land, ocean etc.)preset: a set of pre-defined layers for convenience (see below)
< FEATURE > is the name of the NaturalEarth feature, e.g. "coastlines", "admin_0_countries" etc..
from eomaps import Maps
m = Maps()
m.add_feature.preset.coastline()
m.add_feature.preset.ocean()
m.add_feature.preset.land()
m.add_feature.preset.countries()
m.add_feature.physical.lakes(scale=110, ec="b")
m.add_feature.cultural.admin_0_pacific_groupings(ec="m", lw=2)
# (only if geopandas is installed)
places = m.add_feature.cultural.populated_places.get_gdf(scale=110)
m.add_gdf(places, markersize=places.NATSCALE/10, fc="r")
|
|
NaturalEarth provides features in 3 different scales: 1:10m, 1:50m, 1:110m.
By default EOmaps uses features at 1:50m scale. To set the scale manually, simply use the scale argument
when calling the feature.
It is also possible to automatically update the scale based on the map-extent by using
scale="auto". (Note that if you zoom into a new scale the data might need to be downloaded and reprojected so the map might be irresponsive for a couple of seconds until everything is properly cached.)
If you want to get a geopandas.GeoDataFrame containing all shapes and metadata of a feature, use:
(Have a look at 💠 GeoDataFrames on how to add the obtained GeoDataFrame to the map)
from eomaps import Maps
m = Maps()
gdf = m.add_feature.physical.coastline.get_gdf(scale=10)
The most commonly used features are accessible with pre-defined colors via the preset category:
Add a coastline to the map. |
|
Add ocean-coloring to the map. |
|
Add a land-coloring to the map. |
|
Add country-boundaries to the map. |
|
Add urban-areas to the map. |
|
Add lakes to the map. |
|
Add rivers_lake_centerlines to the map. |
💠 GeoDataFrames
A geopandas.GeoDataFrame can be added to the map via m.add_gdf().
This is basically just a wrapper for the plotting capabilities of
geopandas(e.g.gdf.plot(...)) supercharged with EOmaps features.
Plot a geopandas.GeoDataFrame on the map. |
from eomaps import Maps
import geopandas as gpd
gdf = gpd.GeoDataFrame(geometries=[...], crs=...)<>
m = Maps()
m.add_gdf(gdf, fc="r", ec="g", lw=2)
It is possible to make the shapes of a GeoDataFrame pickable
(e.g. usable with m.cb.pick callbacks) by providing a picker_name
(and specifying a pick_method).
use
pick_method="contains"if yourGeoDataFrameconsists of polygon-geometries (the default)pick a geometry if geometry.contains(mouse-click-position) == True
use
pick_method="centroids"if yourGeoDataFrameconsists of point-geometriespick the geometry with the closest centroid
Once the picker_name is specified, pick-callbacks can be attached via:
m.cb.pick[<PICKER NAME>].attach.< CALLBACK >()
from eomaps import Maps
m = Maps()
# get the GeoDataFrame for a given NaturalEarth feature
gdf = m.add_feature.cultural_110m.admin_0_countries.get_gdf()
# pick the shapes of the GeoDataFrame based on a "contains" query
m.add_gdf(gdf, picker_name="countries", pick_method="contains")
# temporarily highlight the picked geometry
m.cb.pick["countries"].attach.highlight_geometry(fc="r", ec="g", lw=2)
|
|
🏕 Annotations, Markers, Lines, Logos, etc.
🔴 Markers
Static markers can be added to the map via m.add_marker().
If a dataset has been plotted, you can mark any datapoint via its ID, e.g.
ID=...To add a marker at an arbitrary position, use
xy=(...)By default, the coordinates are assumed to be provided in the plot-crs
You can specify arbitrary coordinates via
xy_crs=...
The radius is defined via
radius=...By default, the radius is assumed to be provided in the plot-crs
You can specify the radius in an arbitrary crs via
radius_crs=...
The marker-shape is set via
shape=...Possible arguments are
"ellipses","rectangles","geod_circles"
Additional keyword-arguments are passed to the matplotlib collections used to draw the shapes (e.g. “facecolor”, “edgecolor”, “linewidth”, “alpha”, etc.)
Multiple markers can be added in one go by using lists for
xy,radius, etc.
🛸 For dynamic markers checkout m.cb.click.attach.mark() or m.cb.pick.attach.mark()
add a marker to the plot |
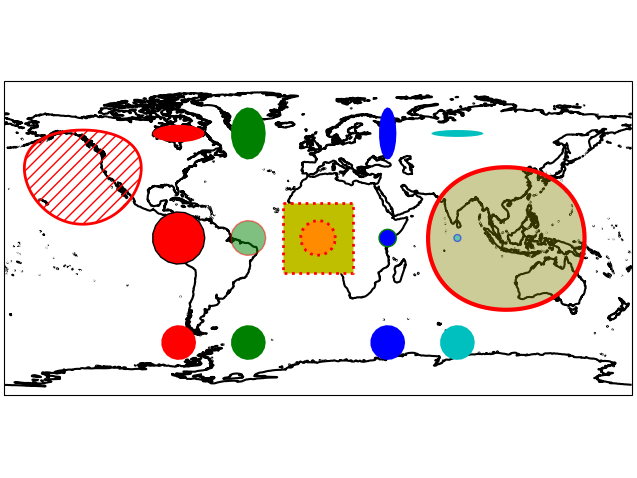
from eomaps import Maps
m = Maps(crs=4326)
m.add_feature.preset.coastline()
# ----- SINGLE MARKERS
# by default, MARKER DIMENSIONS are defined in units of the plot-crs!
m.add_marker(xy=(0, 0), radius=20, shape="rectangles",
fc="y", ec="r", ls=":", lw=2)
m.add_marker(xy=(0, 0), radius=10, shape="ellipses",
fc="darkorange", ec="r", ls=":", lw=2)
# MARKER DIMENSIONS can be specified in any CRS!
m.add_marker(xy=(12000000, 0), xy_crs=3857,
radius=5000000, radius_crs=3857,
fc=(.5, .5, 0, .4), ec="r", lw=3, n=100)
# GEODETIC CIRCLES with radius defined in meters
m.add_marker(xy=(-135, 35), radius=3000000, shape="geod_circles",
fc="none", ec="r", hatch="///", lw=2, n=100)
# ----- MULTIPLE MARKERS
x = [-80, -40, 40, 80] # x-coordinates of the markers
fc = ["r", "g", "b", "c"] # the colors of the markers
# N markers with the same radius
m.add_marker(xy=(x, [-60]*4), radius=10, fc=fc)
# N markers with different radius and properties
m.add_marker(xy=(x, [0]*4), radius=[15, 10, 5, 2],
fc=fc, ec=["none", "r", "g", "b"], alpha=[1, .5, 1, .5])
# N markers with different widths and heights
radius = ([15, 10, 5, 15], [5, 15, 15, 2])
m.add_marker(xy=(x, [60]*4), radius=radius, fc=fc)
|
|
📑 Annotations
Static annotations can be added to the map via m.add_annotation().
The location is defined completely similar to
m.add_marker()above.You can annotate a datapoint via its ID, or arbitrary coordinates in any crs.
Additional arguments are passed to matplotlibs
plt.annotateandplt.textThis gives a lot of flexibility to style the annotations!
🛸 For dynamic annotations checkout m.cb.click.attach.annotate() or m.cb.pick.attach.annotate()
add an annotation to the plot |
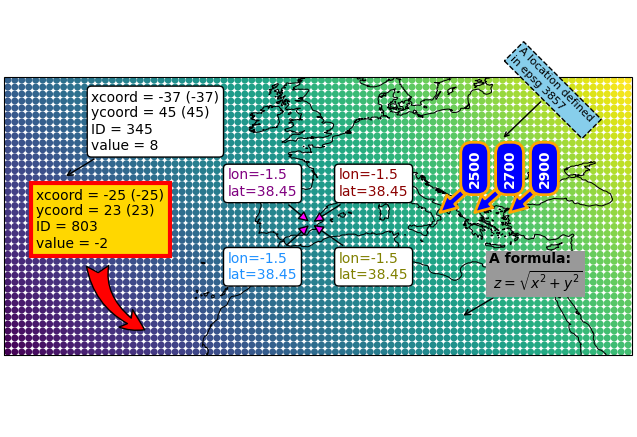
from eomaps import Maps
import numpy as np
x, y = np.mgrid[-45:45, 20:60]
m = Maps(crs=4326)
m.set_data(x+y, x, y)
m.add_feature.preset.coastline(ec="k", lw=.75)
m.plot_map()
# annotate any point in the dataset via the data-index
m.add_annotation(ID=345)
# annotate an arbitrary position (in the plot-crs)
m.add_annotation(
xy=(20,25), text="A formula:\n $z=\sqrt{x^2+y^2}$",
fontweight="bold", bbox=dict(fc=".6", ec="none", pad=2))
# annotate coordinates defined in arbitrary crs
m.add_annotation(
xy=(2873921, 6527868), xy_crs=3857, xytext=(5,5),
text="A location defined \nin epsg 3857", fontsize=8,
rotation=-45, bbox=dict(fc="skyblue", ec="k", ls="--", pad=2))
# functions can be used for more complex text
def text(m, ID, val, pos, ind):
return f"lon={pos[0]}\nlat={pos[1]}"
props = dict(xy=(-1.5, 38.45), text=text,
arrowprops=dict(arrowstyle="-|>", fc="fuchsia",
mutation_scale=15))
m.add_annotation(**props, xytext=(20, 20), color="darkred")
m.add_annotation(**props, xytext=(-60, 20), color="purple")
m.add_annotation(**props, xytext=(-60, -40), color="dodgerblue")
m.add_annotation(**props, xytext=(20, -40), color="olive")
# multiple annotations can be added in one go (xy=([...], [...]) also works!)
m.add_annotation(ID=[2500, 2700, 2900], text=lambda ID, **kwargs: str(ID),
color="w", fontweight="bold", rotation=90,
arrowprops=dict(width=5, fc="b", ec="orange", lw=2),
bbox=dict(boxstyle="round, rounding_size=.8, pad=.5",
fc="b", ec="orange", lw=2))
m.add_annotation(ID=803, xytext=(-80,60),
bbox=dict(ec="r", fc="gold", lw=3),
arrowprops=dict(
arrowstyle="fancy", relpos=(.48,-.2),
mutation_scale=40, fc="r",
connectionstyle="angle3, angleA=90, angleB=-25"))
|
|
🚲 Lines
Lines can be added to a map with m.add_line().
A line is defined by a list of anchor-points and a connection-method
The coordinates of the anchor-points can be provided in any crs
Possible connection-methods are:
connect="geod": connect points via geodesic lines (the default)use
n=10to calculate 10 intermediate points between each anchor-pointor use
del_s=1000to calculate intermediate points (approximately) every 1000 meterscheck the return-values of
m.add_line()to get the actual distances used in each line-segment
connect="straight": connect points via straight linesconnect="straight_crs": connect points with reprojected lines that are straight in a given projectionuse
n=10to calculate 10 (equally-spaced) intermediate points between each anchor-point
Additional keyword-arguments are passed to matpltolib’s
plt.plotThis gives a lot of flexibility to style the lines!
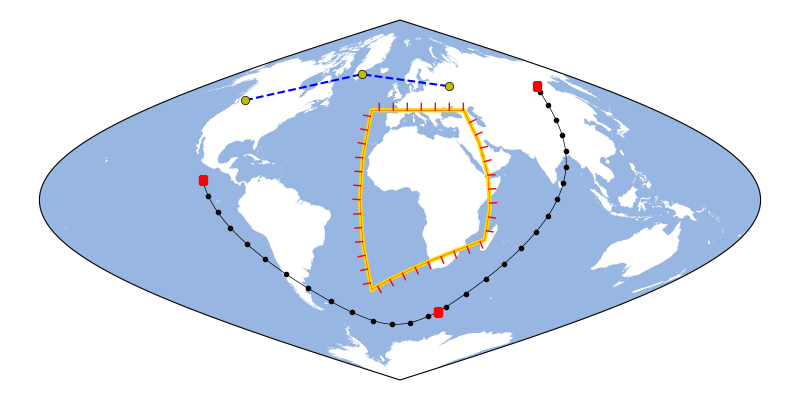
Draw a line by connecting a set of anchor-points. |
from eomaps import Maps
import matplotlib.patheffects as path_effects
m = Maps(Maps.CRS.Sinusoidal(), figsize=(8, 4))
m.add_feature.preset.ocean()
p0 = [(-100,10), (34, -56), (125, 57)]
p1 = [(-120,50), (-42, 63), (45, 57)]
p2 = [(-20,-45), (-20, 45), (45, 45), (45, -20), (-20,-45)]
m.add_line(p0, connect="geod", del_s=100000,
lw=0.5, c="k", mark_points="rs",
marker=".", markevery=10)
m.add_line(p1, connect="straight", c="b", ls="--",
mark_points=dict(fc="y", ec="k", lw=.5))
m.add_line(p2, connect="straight_crs", c="r",
n=5, lw=0.25, ms=5,
path_effects=[
path_effects.withStroke(linewidth=3,
foreground="gold"),
path_effects.TickedStroke(angle=90,
linewidth=1,
length=0.5)])
|
|
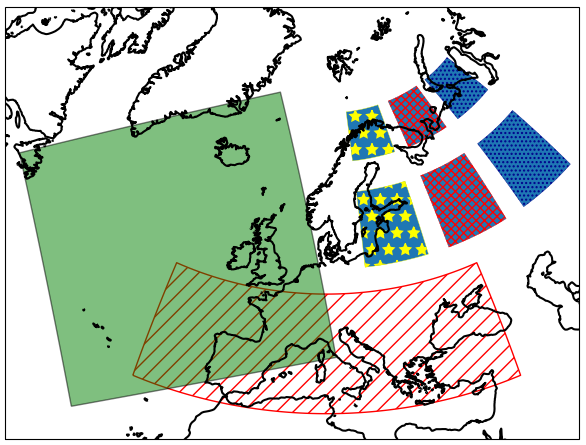
▭ Rectangular areas
To indicate rectangular areas in any given crs, simply use m.indicate_extent:
Indicate a rectangular extent in a given crs on the map. |
from eomaps import Maps
m = Maps(crs=3035)
m.add_feature.preset.coastline(ec="k")
# indicate a lon/lat rectangle
m.indicate_extent(-20, 35, 40, 50, hatch="//", fc="none", ec="r")
# indicate some rectangles in epsg:3035
hatches = ["*", "xxxx", "...."]
colors = ["yellow", "r", "darkblue"]
for i, h, c in zip(range(3), hatches, colors):
pos0 = (2e6 + i*2e6, 7e6, 3.5e6 + i*2e6, 9e6)
pos1 = (2e6 + i*2e6, 7e6 + 3e6, 3.5e6 + i*2e6, 9e6 + 3e6)
m.indicate_extent(*pos0, crs=3857, hatch=h, lw=0.25, ec=c)
m.indicate_extent(*pos1, crs=3857, hatch=h, lw=0.25, ec=c)
# indicate a rectangle in Equi7Grid projection
try: # (requires equi7grid package)
m.indicate_extent(1000000, 1000000, 4800000, 4800000,
crs=Maps.CRS.Equi7Grid_projection("EU"),
fc="g", alpha=0.5, ec="k")
except:
pass
|
|
🥦 Logos
To add a logo (or basically any image file .png, .jpeg etc.) to the map, you can use m.add_logo.
Logos can be re-positioned and re-sized with the 🏗️ Layout Editor!
To fix the relative position of the logo with respect to the map-axis, use
fix_position=True
from eomaps import Maps
m = Maps()
m.add_feature.preset.coastline()
m.add_logo(position="ul", size=.15)
m.add_logo(position="ur", size=.15)
# notice that the bottom logos maintain their relative position on resize/zoom events!
# (and also that they can NOT be moved with the layout-editor)
m.add_logo(position="lr", size=.3, pad=(0.1,0.05), fix_position=True)
m.add_logo(position="ll", size=.4, fix_position=True)
|
|
Add a small image (png, jpeg etc.) to the map whose position is dynamically updated if the plot is resized or zoomed. |
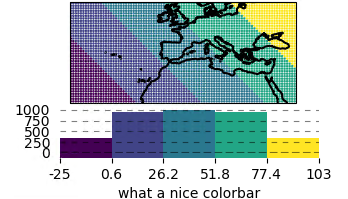
🌈 Colorbars (with a histogram)
m.plot_map().m.add_colorbar.Note
Colorbars are only visible if the layer at which the data was plotted is visible!
m = Maps(layer=0)
...
m.add_colorbar() # this colorbar is only visible on the layer 0
m2 = m.new_layer("data")
...
m2.add_colorbar() # this colorbar is only visible on the "data" layer
Add a colorbar to the map. |
from eomaps import Maps
import numpy as np
x, y = np.mgrid[-45:45, 20:60]
m = Maps()
m.add_feature.preset.coastline()
m.set_data(data=x+y, x=x, y=y, crs=4326)
m.set_classify_specs(scheme=Maps.CLASSIFIERS.EqualInterval, k=5)
m.plot_map()
m.add_colorbar(label="what a nice colorbar", histbins="bins")
|
|
Note
m.plot_map())m.plot_map().Maps object for each dataset! (e.g. via m2 = m.new_layer())Once the colorbar has been created, the colorbar-object can be accessed via m.colorbar.
It has the following useful methods defined:
Set the position of the colorbar (and all colorbars that share the same location) |
|
Set the size of the histogram (relative to the total colorbar size) |
|
Set the visibility of the colorbar |
|
Remove the colorbar from the map. |
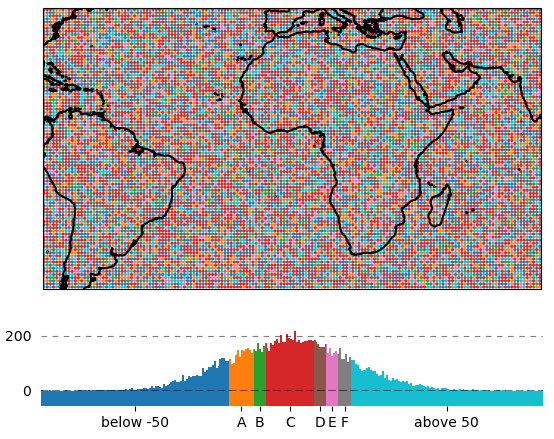
📎 Set colorbar tick labels based on bins
To label the colorbar with custom names for a given set of bins, use m.colorbar.set_bin_labels():
import numpy as np
from eomaps import Maps
# specify some random data
lon, lat = np.mgrid[-45:45, -45:45]
data = np.random.normal(0, 50, lon.shape)
# use a custom set of bins to classify the data
bins = np.array([-50, -30, -20, 20, 30, 40, 50])
names = np.array(["below -50", "A", "B", "C", "D", "E", "F", "above 50"])
m = Maps()
m.add_feature.preset.coastline()
m.set_data(data, lon, lat)
m.set_classify.UserDefined(bins=bins)
m.plot_map(cmap="tab10")
m.add_colorbar()
# set custom colorbar-ticks based on the bins
m.colorbar.set_bin_labels(bins, names)
|
|
Set the tick-labels of the colorbar to custom names with respect to a given set of bins. |
🌠 Using the colorbar as a “dynamic shade indicator”
If you use shade_raster or shade_points as plot-shape, the colorbar can be used to indicate the
distribution of the shaded pixels within the current field of view by setting dynamic_shade_indicator=True.
📏 Scalebars
A scalebar can be added to a map via s = m.add_scalebar():
Add a scalebar to the map. |
from eomaps import Maps
m = Maps(Maps.CRS.Sinusoidal())
m.add_feature.preset.ocean()
s = m.add_scalebar()
|
|
Note
The scalebar is a pickable object! Click on it with the LEFT mouse button to drag it around, and use the RIGHT mouse button to make it fixed again.
If the scalebar is picked (indicated by a red border), you can use the following keys for adjusting some of the ScaleBar properties:
delte: remove the scalebar from the plot+and-: rotate the scalebarup/down/left/right: increase the size of the framealt + up/down/left/right: decrease the size of the frame
The returned ScaleBar object provides the following useful methods:
Remove the scalebar from the map |
|
Set the position of the colorbar |
|
Return the current position (and orientation) of the scalebar (e.g. |
|
Set the properties of the labels (and update the plot accordingly) |
|
Set the properties of the frame (and update the plot accordingly) |
|
Set the properties of the scalebar (and update the plot accordingly) |
|
Get/set the interval for the text-offset when using the <alt> + <+>/<-> keyboard-shortcut to set the offset for the scalebar-labels. |
|
Get/set the interval for the rotation when using the <+> and <-> keys on the keyboard to rotate the scalebar |
🧭 Compass (or North Arrow)
A compass can be added to the map via m.add_compass():
To add a North-Arrow, use
m.add_compass(style="north arrow")
Note
While a compass is picked (and the LEFT mouse button is pressed), the following additional interactions are available:
press
delteon the keyboard: remove the compass from the plotrotate the
mouse wheel: scale the size of the compass
Add a "compass" or "north-arrow" to the map. |
from eomaps import Maps
m = Maps(Maps.CRS.Stereographic())
m.add_feature.preset.ocean()
m.add_compass()
|
|
The compass object is dynamically updated if you pan/zoom the map, and it can be dragged around on the map with the mouse.
The returned compass object has the following useful methods assigned:
Set the style of the background patch. |
|
Set the size of the compass. |
|
Set if the compass can be picked with the mouse or not. |
|
Set how to deal with invalid rotation-angles. |
|
Remove the compass from the map. |
🦜 Utility widgets
Some helpful utility widgets can be added to a map via m.util.<...>
|
A collection of utility tools that can be added to EOmaps plots |
Layer switching
To simplify switching between layers, there are currently 2 widgets available:
m.util.layer_selector(): Add a set of clickable buttons to the map that activates the corresponding layers.m.util.layer_slider(): Add a slider to the map that iterates through the available layers.
By default, the widgets will show all available layers (except the “all” layer) and the widget will be automatically updated whenever a new layer is created on the map.
To show only a subset of layers, provide an explicit list via:
layers=[...layer names...].To exclude certain layers from the widget, use
exclude_layers=[...layer-names to exclude...]To remove a previously created widget
sfrom the map, simply uses.remove()
A button-widget that can be used to select the displayed plot-layer. |
|
Get a slider-widget that can be used to switch between layers. |
from eomaps import Maps
m = Maps(layer="coastline")
m.add_feature.preset.coastline()
m2 = m.new_layer(layer="ocean")
m2.add_feature.preset.ocean()
s = m.util.layer_selector()
|
|
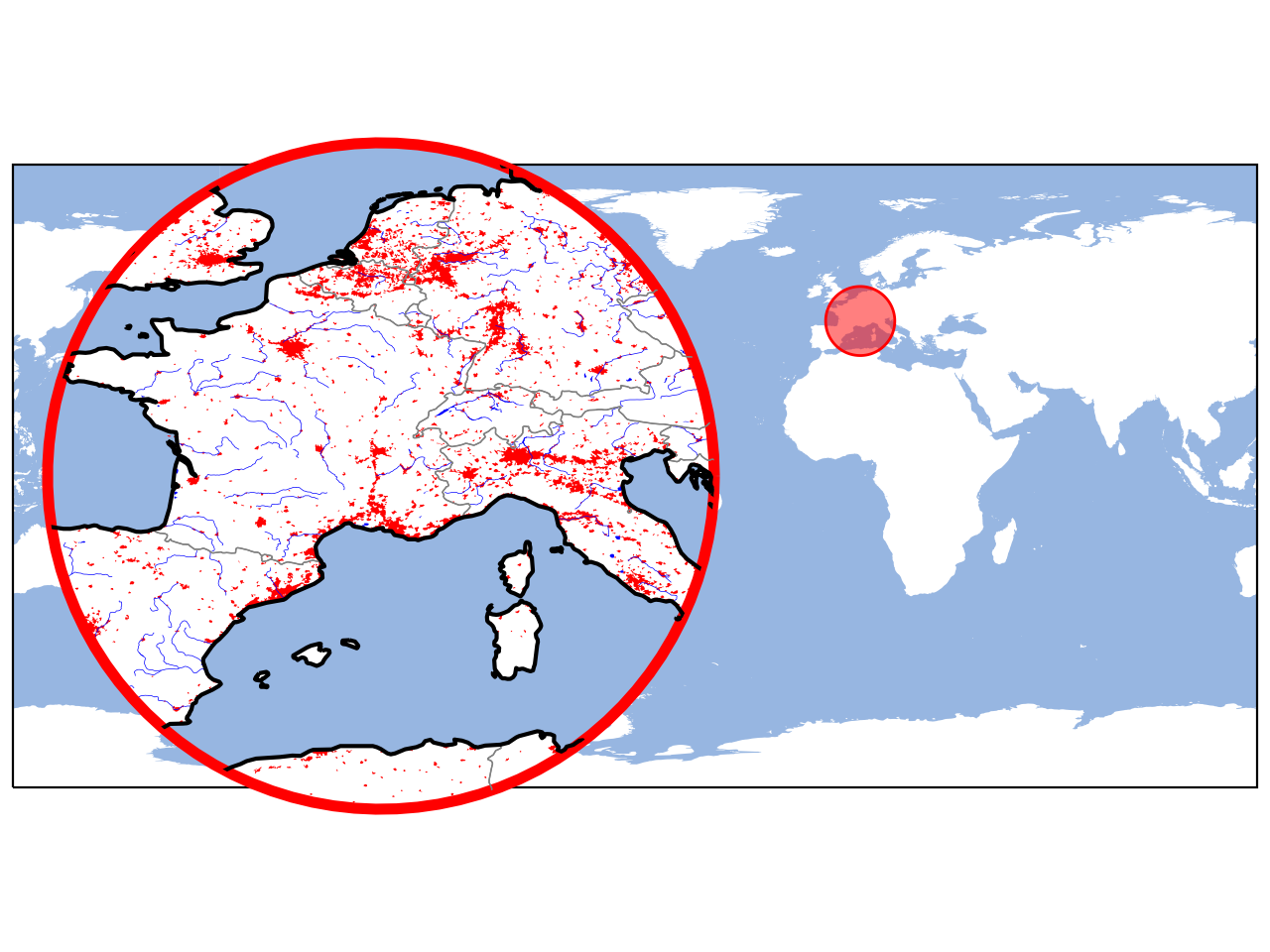
🔬 Inset-maps - zoom-in on interesting areas
Inset maps that show zoomed-in regions can be created with m.new_inset_map().
m = Maps() # the "parent" Maps-object (e.g. the "big" map)
m.add_feature.preset.coastline()
m2 = m.new_inset_map(xy=(5, 5), radius=10) # a new Maps-object that represents the inset-map
m2.add_feature.preset.ocean() # it can be used just like any other Maps-objects!
An inset-map is defined by it’s center-position and a radius
The used boundary-shape can be one of:
“ellipses” (e.g. projected ellipses with a radius defined in a given crs)
“rectangles” (e.g. projected rectangles with a radius defined in a given crs)
“geod_circles” (e.g. geodesic circles with a radius defined in meters)
For convenience, inset-map objects have the following special methods defined:
m.set_inset_position(): Set the size and (center) position of the inset-map relative to the figure size.m.indicate_inset_extent(): Indicate the extent of the inset-map on arbitrary Maps-objects.
Checkout the associated example on how to use inset-maps: 🔬 Inset-maps - get a zoomed-in view on selected areas
Make sure to checkout the 🏗️ Layout Editor which can be used to quickly re-position (and re-size) inset-maps with the mouse!
m = Maps(Maps.CRS.PlateCarree(central_longitude=-60))
m.add_feature.preset.ocean()
m2 = m.new_inset_map(xy=(5, 45), radius=10,
plot_position=(.3, .5), plot_size=.7,
boundary=dict(ec="r", lw=4),
indicate_extent=dict(fc=(1,0,0,.5),
ec="r", lw=1)
)
m2.add_feature.preset.coastline()
m2.add_feature.preset.countries()
m2.add_feature.preset.ocean()
m2.add_feature.cultural_10m.urban_areas(fc="r")
m2.add_feature.physical_10m.rivers_europe(ec="b", lw=0.25,
fc="none")
m2.add_feature.physical_10m.lakes_europe(fc="b")
|
|
Create a new (empty) inset-map that shows a zoomed-in view on a given extent. |
✏️ Draw Shapes on the map
Starting with EOmaps v5.0 it is possible to draw simple shapes on the map using m.draw.
- The shapes can be saved to disk as geo-coded shapefiles using
m.draw.save_shapes(filepath).(Saving shapes requires thegeopandasmodule!) To remove the most recently drawn shape use
m.draw.remove_last_shape().
m = Maps()
m.add_feature.preset.coastline()
m.draw.polygon()
|

|
Note
Drawing capabilities are fully integrated in the 🧰 Companion Widget. In most cases it is much more convenient to draw shapes with the widget instead of executing the commands in a console!
In case you still stick to using the commands for drawing shape, it is important to know that the calls for drawing shapes are non-blocking and starting a new draw will silently cancel active draws!
Initialize a new ShapeDrawer. |
|
Draw a rectangle. |
|
Draw a circle. |
|
Draw arbitarary polygons |
|
Remove the most recently plotted polygon from the map. |
🏗️ Layout Editor
EOmaps provides a Layout Editor that can be used to quickly re-arrange the positions of all axes of a figure. You can use it to simply drag the axes the mouse to the desired locations and change their size with the scroll-wheel.
Keyboard shortcuts are assigned as follows:
press
Pick and re-arrange the axes as you like with the mouse.
For “colorbars” there are some special options:
Press keys
|
|
Save and restore layouts
Once a layout (e.g. the desired position of the axes within a figure) has been arranged, the layout can be saved and re-applied with:
🌟
m.get_layout(): get the current layout (or dump the layout as a json-file)🌟
m.apply_layout(): apply a given layout (or load and apply the layout from a json-file)
It is also possible to enter the Layout Editor and save the layout automatically on exit with:
🌟
m.edit_layout(filepath=...): enter LayoutEditor and save layout as a json-file on exit
Note
A layout can only be restored if the number (and order) of the axes remains the same! In other words:
you always need to save a new layout-file after adding additional axes (or colorbars!) to a map
Get the positions of all axes within the current plot. |
|
Set the positions of all axes within the current plot based on a previously defined layout. |
|
Activate the "layout-editor" to quickly re-arrange the positions of subplots. |
📦 Reading data (NetCDF, GeoTIFF, CSV…)
EOmaps provides some basic capabilities to read and plot directly from commonly used file-types.
By default, the Maps.from_file and m.new_layer_from_file functions try to plot the data
with shade_raster (if it fails it will fallback to shade_points and finally to ellipses).
Note
At the moment, the readers are intended as a “shortcut” to read well-structured datasets!
If they fail, simply read the data manually and then set the data as usual via m.set_data(...).
Under the hood, EOmaps uses the following libraries to read data:
GeoTIFF (
rioxarray+xarray.open_dataset)NetCDF (
xarray.open_dataset)CSV (
pandas.read_csv)
Read relevant data from a file
m.read_file.<filetype>(...) can be used to read all relevant data (e.g. values, coordinates & crs) from a file.
m = Maps()
data = m.read_file.NetCDF(
"the filepath",
parameter="adsf",
coords=("longitude", "latitude"),
data_crs=4326,
isel=dict(time=123)
)
m.set_data(**data)
...
m.plot_map()
Read all relevant information necessary to add a GeoTIFF to the map. |
|
Read all relevant information necessary to add a NetCDF to the map. |
|
Read all relevant information necessary to add a CSV-file to the map. |
Initialize Maps-objects from a file
Maps.from_file.<filetype>(...) can be used to directly initialize a Maps object from a file.
(This is particularly useful if you have a well-defined file-structure that you need to access regularly)
m = Maps.from_file.GeoTIFF(
"the filepath",
classify_specs=dict(Maps.CLASSFIERS.Quantiles, k=10),
cmap="RdBu"
)
m.add_colorbar()
m.cb.pick.attach.annotate()
Convenience function to initialize a new Maps-object from a GeoTIFF file. |
|
Convenience function to initialize a new Maps-object from a NetCDF file. |
|
Convenience function to initialize a new Maps-object from a CSV file. |
Add new layers to existing Maps-objects from a file
Similar to Maps.from_file, a new layer based on a file can be added to an existing Maps object via Maps.new_layer_from_file.<filetype>(...).
m = Maps8()
m.add_feature.preset.coastline()
m2 = m.new_layer_from_file(
"the filepath",
parameter="adsf",
coords=("longitude", "latitude"),
data_crs=4326,
isel=dict(time=123),
classify_specs=dict(Maps.CLASSFIERS.Quantiles, k=10),
cmap="RdBu"
)
Convenience function to initialize a new Maps-object from a GeoTIFF file. |
|
Convenience function to initialize a new Maps-object from a NetCDF file. |
|
Convenience function to initialize a new Maps-object from a CSV file. |
🔸 Miscellaneous
some additional functions and properties that might come in handy:
Attach a callback that is executed if the associated layer is activated. |
|
Set the map-extent based on a given location query. |
|
Get the pyproj CRS instance of a given crs specification |
|
Add circles to the map that indicate masked points. |
|
Make the layer of this Maps-object visible. |
|
Display the selected layer on the map. |
|
The Blit-Manager used to dynamically update the plots |
|
Join the x- and y- limits of the axes (e.g. |
|
Print a static image of the current figure to the active IPython display. |