🌱 Basics
Getting started
Maps objects.The first Maps object that is created will initialize a
matplotlib.Figure and a
cartopy.GeoAxes
for a map.
from eomaps import Maps
m = Maps( # Create a Maps-object
crs=4326, # Use lon/lat (epsg=4326) projection
layer="base", # Assign the layer-name "base"
figsize=(6, 5)) # Set the figure-size to 6x5
m.set_extent((-25, 35, 30, 70)) # Set the extent of the map
m.set_frame(linewidth=3) # Set the linewidth of the frame
m.add_feature.preset.coastline() # Add coastlines
m.add_feature.preset.ocean() # Add ocean-coloring
m.add_title("My first map", # Add a title
fontsize=16) # With a fontsize of 16pt
crsrepresents the projection used for plottinglayerrepresents the name of the layer associated with the Maps-object (see Layer management).all additional keyword arguments are forwarded to the creation of the matplotlib-figure (e.g.:
figsize,frameon,edgecoloretc).
Possible ways for specifying the crs for plotting
If you provide an integer, it is identified as an epsg-code (e.g.
4326,3035, etc.)4326 defaults to PlateCarree projection
All other CRS usable for plotting are accessible via
Maps.CRS, e.g.:crs=Maps.CRS.Orthographic(),crs=Maps.CRS.Equi7_EU…Maps.CRSis just an accessor forcartopy.crsFor a full list of available projections see: Cartopy projections
The base-class for generating plots with EOmaps. |
|
|
The crs module defines Coordinate Reference Systems and the transformations between them. |
Set the extent (x0, x1, y0, y1) of the map in the given coordinate system. |
|
Convenience function to add a title to the map. |
Layer management
A Maps object represents one (or more) of the following things on the assigned layer:
a collection of features, callbacks,..
a single dataset (and associated callbacks)
You can create as many layers as you need! The following image explains how it works in general:
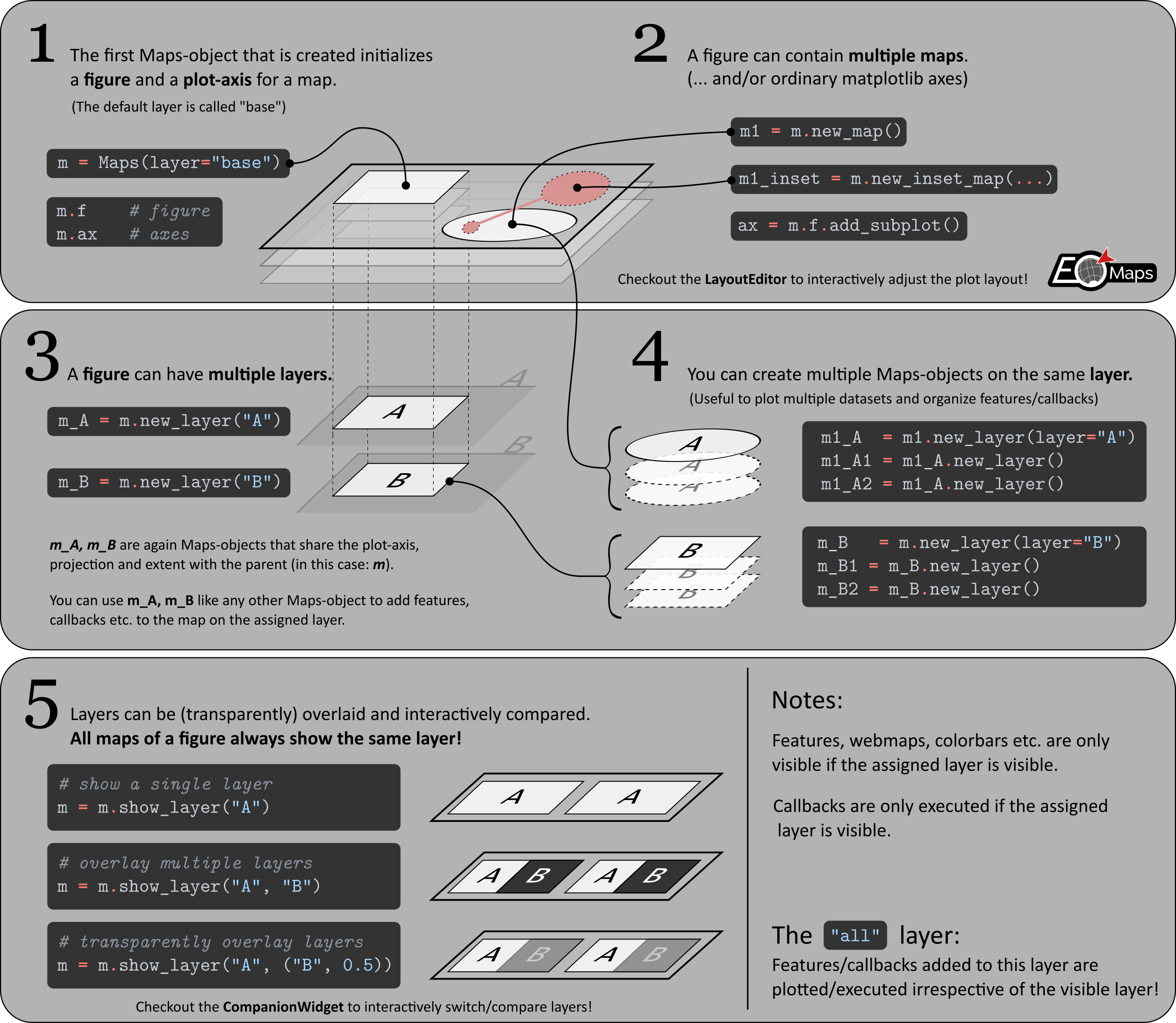
Creating new layers
To create a NEW layer, use m.new_layer("layer-name").
Features, Colorbars etc. added to a
Mapsobject are only visible if the associated layer is visible.Callbacks are only executed if the associated layer is visible.
See 🗗 Combine & compare multiple layers on how to select the currently visible layer(s).
from eomaps import Maps
m = Maps() # same as `m = Maps(crs=4326, layer="base")`
m.add_feature.preset.coastline() # add coastlines to the "base" layer
m_ocean = m.new_layer(layer="ocean") # create a new layer named "ocean"
m_ocean.add_feature.preset.ocean() # features on this layer will only be visible if the "ocean" layer is visible!
m.show_layer("ocean") # show the "ocean" layer
m.util.layer_selector() # get a utility widget to quickly switch between existing layers
Multiple Maps objects on the same layer
If no explicit layer-name is provided, (e.g. m.new_layer()) the returned Maps object will use the same layer as the parent Maps object.
This is especially useful if you want to plot multiple datasets on the same map and layer.
from eomaps import Maps
m = Maps() # same as `m = Maps(layer="base")`
m.add_feature.preset.coastline() # add coastlines to the "base" layer
m2 = m.new_layer() # "m2" is just another Maps-object on the same layer as "m"!
m2.set_data( # assign a dataset to this Maps-object
data=[.14,.25,.38],
x=[1,2,3], y=[3,5,7],
crs=4326)
m2.plot_map() # plot the data
m2.cb.pick.attach.annotate() # attach a callback that picks datapoints from the data assigned to "m2"
The “all” layer
"all" layer.You can add features and callbacks to the all layer via:
using the shortcut
m.all. ...creating a dedicated
Mapsobject viam_all = Maps(layer="all")orm_all = m.new_layer("all")using the “layer” kwarg of functions e.g.
m.plot_map(layer="all")
from eomaps import Maps
m = Maps()
m.all.add_feature.preset.coastline() # add coastlines to ALL layers of the map
m_ocean = m.new_layer(layer="ocean") # create a new layer named "ocean"
m_ocean.add_feature.preset.ocean() # add ocean-coloring to the "ocean" layer
m.show_layer("ocean") # show the "ocean" layer (note that it has coastlines as well!)
Artists added with methods outside of EOmaps
If you use methods that are NOT provided by EOmaps, the corresponding artists will always appear on the "base" layer by default!
(e.g. cartopy or matplotlib methods accessible via m.ax. or m.f. like m.ax.plot(...))
In most cases this behavior is sufficient… for more complicated use-cases, artists must be explicitly added to the Blit Manager (m.BM) so that EOmaps can handle drawing accordingly.
To put the artists on dedicated layers, use one of the the following options:
For artists that are dynamically updated on each event, use
m.BM.add_artist(artist, layer=...)For “background” artists that only require updates on pan/zoom/resize, use
m.BM.add_bg_artist(artist, layer=...)
from eomaps import Maps
m = Maps()
m.all.add_feature.preset.coastline() # add coastlines to ALL layers of the map
# draw a red X over the whole axis and put the lines
# as background-artists on the layer "mylayer"
(l1, ) = m.ax.plot([0, 1], [0, 1], lw=5, c="r", transform=m.ax.transAxes)
(l2, ) = m.ax.plot([0, 1], [1, 0], lw=5, c="r", transform=m.ax.transAxes)
m.BM.add_bg_artist(l1, layer="mylayer")
m.BM.add_bg_artist(l2, layer="mylayer")
m.show_layer("mylayer")
🗗 Combine & compare multiple layers
All maps of a figure always show the same visible layer.
The visible layer can be a single layer-name, or a combination of multiple layer-names in order to to transparently combine/overlay multiple layers.
Using the 🧰 Companion Widget to switch/overlay layers
Usually it is most convenient to combine and compare layers via the 🧰 Companion Widget.
Use the dropdown-list at the top-right to select a single layer or overlay multiple layers.
Click on a single layer to make it the visible layer.
Hold down
controlorshiftto overlay multiple layers.
Select one or more layers to dynamically adjust the stacking-order via the layer-tabs of the Compare and Edit views.
Hold down
controlwhile clicking on a tab to make it the visible layer.Hold down
shiftwhile clicking on a tab to overlay multiple layers.Re-arrange the tabs to change the stacking-order of the layers.

Programmatically switch/overlay layers
To programmatically switch between layers or view a layer that represents a combination of multiple existing layers, use Maps.show_layer().
If you provide a single layer-name, the map will show the corresponding layer, e.g. m.show_layer("my_layer")
To (transparently) overlay multiple existing layers, use one of the following options:
Provide multiple layer names or tuples of the form
(< layer-name >, < transparency [0-1] >)m.show_layer("A", "B")will overlay all features of the layerBon top of the layerA.m.show_layer("A", ("B", 0.5))will overlay the layerBwith 50% transparency on top of the layerA.
Provide a combined layer name by separating the individual layer names you want to show with a
"|"character.m.show_layer("A|B")will overlay all features of the layerBon top of the layerA.To transparently overlay a layer, add the transparency to the layer-name in curly-brackets, e.g.:
"<layer-name>{<transparency>}".m.show_layer("A|B{0.5}")will overlay the layerBwith 50% transparency on top of the layerA.
from eomaps import Maps
m = Maps(layer="first")
m.add_feature.physical.land(fc="k")
m2 = m.new_layer("second") # create a new layer and plot some data
m2.add_feature.preset.ocean(zorder=2)
m2.set_data(data=[.14,.25,.38],
x=[10,20,30], y=[30,50,70],
crs=4326)
m2.plot_map(zorder=1) # plot the data "below" the ocean
m.show_layer("first", ("second", .75)) # overlay the second layer with 25% transparency
Interactively overlay layers
If you want to interactively overlay a part of the screen with a different layer, have a look at peek_layer() callbacks!
Overlay a part of the map with a different layer if you click on the map. |
from eomaps import Maps
m = Maps()
m.all.add_feature.preset.coastline()
m.add_feature.preset.urban_areas()
m.add_feature.preset.ocean(layer="ocean")
m.add_feature.physical.land(layer="land", fc="g")
m.cb.click.attach.peek_layer(layer=["ocean", ("land", 0.5)], shape="round", how=0.4)
The “stacking order” of features and layers
The stacking order of features at the same layer is controlled by the zorder argument.
e.g.
m.plot_map(zorder=1)orm.add_feature.cultural.urban_areas(zorder=10)
If you stack multiple layers on top of each other, the stacking is determined by the order of the layer-names (from right to left)
e.g.
m.show_layer("A", "B")will show the layer"B"on top of the layer"A"you can stack as many layers as you like!
m.show_layer("A", "B", ("C", 0.5), "D", ...)
Create a new Maps-object that shares the same plot-axes. |
|
Get a Maps-object on the "all" layer. |
|
Show the map (only required for non-interactive matplotlib backends). |
|
Show a single layer or (transparently) overlay multiple selected layers. |
|
Fetch (and cache) the layers of a map. |
Image export (jpeg, png, svg, etc.)
Once the map is ready, an image of the map can be saved at any time by using Maps.savefig()
from eomaps import Maps
m = Maps()
m.add_feature.preset.ocean()
m.savefig("snapshot1.png", dpi=200, transparent=True)
To adjust the margins of the subplots, use m.subplots_adjust(), or have a look at the 🏗️ Layout Editor!
from eomaps import Maps
m = Maps()
m.subplots_adjust(left=0.1, right=0.9, bottom=0.05, top=0.95)
Export to clipboard (ctrl + c)
If you use PyQt5 as matplotlib-backend, you can also press (control + c) to export the figure to the clipboard.
The export will be performed using the currently set export-parameters in the 🧰 Companion Widget .
Alternatively, you can also programmatically set the export-parameters via Maps.set_clipboard_kwargs() .
Notes on exporting high-dpi figures
EOmaps tries its best to follow the WYSIWYG concept (e.g. “What You See Is What You Get”).
However, if you export the map with a dpi-value other than 100, there are certain circumstances
where the final image might look different.
To summarize:
Changing the dpi of the figure requires a re-draw of all plotted datasets.
if you use
shadeshapes to represent the data, using a higher dpi-value can result in a very different appearance of the data!
WebMap services usually come as image-tiles with 96 dpi
by default, images are not re-fetched when saving the map to keep the original appearance
If you want to re-fetch the WebMap based on the export-dpi, use
m.savefig(refetch_wms=True).Note: increasing the dpi will result in an increase in the number of tiles that have to be fetched. If the number of required tiles is too large, the server might reject the request and the map might have gaps or no tiles at all.
Save the current figure. |
|
Update the subplot parameters of the grid. |
|
Set GLOBAL savefig parameters for all Maps objects on export to the clipboard. |
Multiple Maps (and/or plots) in one figure
It is possible to combine multiple EOmaps maps and/or ordinary matpltolib plots in one figure.
The figure used by a Maps object is set via the f argument, e.g.: m = Maps(f=...).
If no figure is provided, a new figure is created whenever you initialize a Maps object.
The figure-instance of an existing Maps object is accessible via m.f
To add a map to an existing figure, use
m2 = m.new_map()(requires EOmaps >= v6.1) or pass the figure-instance on initialization of a newMapsobject.To add a ordinary
matplotlibplot to a figure containing an eomaps-map, usem.f.add_subplot()orm.f.add_axes().
The initial position of the axes used by a Maps object is set via the ax argument,
e.g.: m = Maps(ax=...) or m2 = m.new_map(ax=...)
The syntax for positioning axes is similar to matplotlibs
f.add_subplot()orf.add_axes()The axis-instance of an existing
Mapsobject is accessible viam.ax…for more information, checkout the matplotlib tutorial: Customizing Figure Layouts
Note
Make sure to have a look at the 🏗️ Layout Editor on how to re-position and re-scale axes to arbitrary positions!
The base-class for generating plots with EOmaps. |
|
Create a new map that shares the figure with this Maps-object. |
In the following, the most commonly used cases are introduced:
Grid positioning
To position the map in a (virtual) grid, one of the following options are possible:
Three integers
(nrows, ncols, index)(or 2 integers and a tuple).The map will take the
indexposition on a grid withnrowsrows andncolscolumns.indexstarts at 1 in the upper left corner and increases to the right.indexcan also be a two-tuple specifying the (first, last) indices (1-based, and including last) of the map, e.g.,Maps(ax=(3, 1, (1, 2)))makes a map that spans the upper 2/3 of the figure.
from eomaps import Maps # ----- initialize a figure with an EOmaps map # position = item 1 of a 2x1 grid m = Maps(ax=(2, 1, 1)) # ----- add a normal matplotlib axes # position = item 2 of a 2x1 grid ax = m.f.add_subplot(2, 1, 2)
from eomaps import Maps
# ----- initialize a figure with an EOmaps map
# position = item 1 of a 2x2 grid
m = Maps(ax=(2, 2, 1))
# ----- add another Map to the same figure
# position = item 3 of a 2x2 grid
m2 = m.new_map(ax=(2, 2, 3))
# ----- add a normal matplotlib axes
# position = second item of a 1x2 grid
ax = m.f.add_subplot(1, 2, 2)
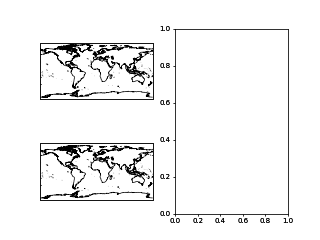
from eomaps import Maps
# ----- initialize a figure with an EOmaps map
# position = item 1 of a 2x2 grid
m = Maps(ax=(2, 2, 1))
# ----- add another Map to the same figure
# position = item 3 of a 2x2 grid
m2 = m.new_map(ax=(2, 2, 3))
# ----- add a normal matplotlib axes
# position = second item of a 1x2 grid
ax = m.f.add_subplot(1, 2, 2)
A 3-digit integer.
The digits are interpreted as if given separately as three single-digit integers, i.e.
Maps(ax=235)is the same asMaps(ax=(2, 3, 5)).Note that this can only be used if there are no more than 9 subplots.
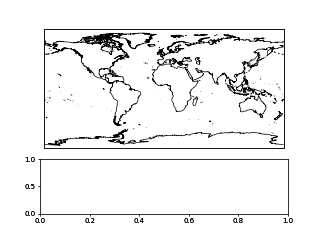
from eomaps import Maps
# ----- initialize a figure with an EOmaps map
m = Maps(ax=211)
# ----- add a normal matplotlib axes
ax = m.f.add_subplot(212)
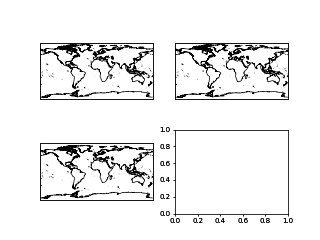
from eomaps import Maps
# ----- initialize a figure with an EOmaps map
m = Maps(ax=221)
# ----- add 2 more Maps to the same figure
m2 = m.new_map(ax=222)
m3 = m.new_map(ax=223)
# ----- add a normal matplotlib axes
ax = m.f.add_subplot(224)
A matplotlib GridSpec
from matplotlib.gridspec import GridSpec
from eomaps import Maps
gs = GridSpec(2, 2)
m = Maps(ax=gs[0,0])
m2 = m.new_map(ax=gs[0,1])
ax = m.f.add_subplot(gs[1,:])
Absolute positioning
To set the absolute position of the map, provide a list of 4 floats representing (left, bottom, width, height).
The absolute position of the map expressed in relative figure coordinates (e.g. ranging from 0 to 1)
Note
Since the effective size of the Map is dependent on the current zoom-region, the position always represents the maximal area that can be occupied by the map!
Also, using m.f.tight_layout() will not work with axes added in this way.
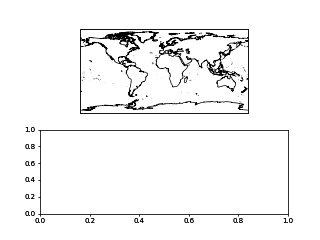
from eomaps import Maps
# ----- initialize a figure with an EOmaps map
m = Maps(ax=(.07, 0.53, .6, .3))
# ----- add a normal matplotlib axes
ax = m.f.add_axes((.35, .15, .6, .2))
Using already existing figures / axes
It is also possible to insert an EOmaps map into an existing figure or reuse an existing axes.
To put a map on an existing figure, provide the figure-instance via
m = Maps(f= <the figure instance>)To use an existing axes, provide the axes-instance via
m = Maps(ax= <the axes instance>)
NOTE: The axes MUST be a cartopy-
GeoAxes!
import matplotlib.pyplot as plt
import cartopy
from eomaps import Maps
f = plt.figure(figsize=(10, 7))
ax = f.add_subplot(projection=cartopy.crs.Mollweide())
m = Maps(f=f, ax=ax)
Dynamic updates of plots in the same figure
As soon as a
Maps-object is attached to a figure, EOmaps will handle re-drawing of the figure! Therefore dynamically updated artists must be added to the “blit-manager” (m.BM) to ensure that they are correctly updated.
use
m.BM.add_artist(artist, layer=...)if the artist should be re-drawn on any event in the figureuse
m.BM.add_bg_artist(artist, layer=...)if the artist should only be re-drawn if the extent of the map changes
Note
In most cases it is sufficient to simply add the whole axes-object as artist via m.BM.add_artist(...).
This ensures that all artists of the axes are updated as well!
Here’s an example to show how it works:
from eomaps import Maps
# Initialize a new figure with an EOmaps map
m = Maps(ax=223)
m.ax.set_title("click me!")
m.add_feature.preset.coastline()
m.cb.click.attach.mark(radius=20, fc="none", ec="r", lw=2)
# Add another map to the figure
m2 = m.new_map(ax=224, crs=Maps.CRS.Mollweide())
m2.add_feature.preset.coastline()
m2.add_feature.preset.ocean()
m2.cb.click.attach.mark(radius=20, fc="none", ec="r", lw=2, n=200)
# Add a "normal" matplotlib plot to the figure
ax = m.f.add_subplot(211)
# Since we want to dynamically update the data on the axis, it must be
# added to the BlitManager to ensure that the artists are properly updated.
# (EOmaps handles interactive re-drawing of the figure)
m.BM.add_artist(ax, layer=m.layer)
# plot some static data on the axis
ax.plot([10, 20, 30, 40, 50], [10, 20, 30, 40, 50])
# define a callback that plots markers on the axis if you click on the map
def cb(pos, **kwargs):
ax.plot(*pos, marker="o")
m.cb.click.attach(cb) # attach the callback to the first map
m.cb.click.share_events(m2) # share click events between the 2 maps
MapsGrid objects
MapsGrid objects can be used to create (and manage) multiple maps in one figure.
Note
While MapsGrid objects provide some convenience, starting with EOmaps v6.x,
the preferred way of combining multiple maps and/or matplotlib axes in a figure
is by using one of the options presented in the previous sections!
A MapsGrid creates a grid of Maps objects (and/or ordinary matpltolib axes),
and provides convenience-functions to perform actions on all maps of the figure.
from eomaps import MapsGrid
mg = MapsGrid(r=2, c=2, crs=4326)
# you can then access the individual Maps-objects via:
mg.m_0_0.add_feature.preset.ocean()
mg.m_0_1.add_feature.preset.land()
mg.m_1_0.add_feature.preset.urban_areas()
mg.m_1_1.add_feature.preset.rivers_lake_centerlines()
m_0_0_ocean = mg.m_0_0.new_layer("ocean")
m_0_0_ocean.add_feature.preset.ocean()
# functions executed on MapsGrid objects will be executed on all Maps-objects:
mg.add_feature.preset.coastline()
mg.add_compass()
# to perform more complex actions on all Maps-objects, simply loop over the MapsGrid object
for m in mg:
m.add_gridlines(10, c="lightblue")
# set the margins of the plot-grid
mg.subplots_adjust(left=0.1, right=0.9, bottom=0.05, top=0.95, hspace=0.1, wspace=0.05)
Make sure to checkout the 🏗️ Layout Editor which greatly simplifies the arrangement of multiple axes within a figure!
Custom grids and mixed axes
Fully customized grid-definitions can be specified by providing m_inits and/or ax_inits dictionaries
of the following structure:
The keys of the dictionary are used to identify the objects
The values of the dictionary are used to identify the position of the associated axes
The position can be either an integer
N, a tuple of integers or slices(row, col)Axes that span over multiple rows or columns, can be specified via
slice(start, stop)
dict(
name1 = N # position the axis at the Nth grid cell (counting firs)
name2 = (row, col), # position the axis at the (row, col) grid-cell
name3 = (row, slice(col_start, col_end)) # span the axis over multiple columns
name4 = (slice(row_start, row_end), col) # span the axis over multiple rows
)
m_initsis used to initializeMapsobjectsax_initsis used to initialize ordinarymatplotlibaxes
The individual Maps objects and matpltolib-Axes are then accessible via:
from eomaps import MapsGrid
mg = MapsGrid(2, 3,
m_inits=dict(ocean=(0, 0), land=(0, 2)),
ax_inits=dict(someplot=(1, slice(0, 3)))
)
# Maps object with the name "left"
mg.m_ocean.add_feature.preset.ocean()
# the Maps object with the name "right"
mg.m_land.add_feature.preset.land()
# the ordinary matplotlib-axis with the name "someplot"
mg.ax_someplot.plot([1,2,3], marker="o")
mg.subplots_adjust(left=0.1, right=0.9, bottom=0.2, top=0.9)
❗ NOTE: if m_inits and/or ax_inits are provided, ONLY the explicitly defined objects are initialized!
The initialization of the axes is based on matplotlib’s GridSpec functionality. All additional keyword-arguments (
width_ratios, height_ratios, etc.) are passed to the initialization of theGridSpecobject.To specify unique
crsfor eachMapsobject, provide a dictionary ofcrsspecifications.
from eomaps import MapsGrid
# initialize a grid with 2 Maps objects and 1 ordinary matplotlib axes
mg = MapsGrid(2, 2,
m_inits=dict(top_row=(0, slice(0, 2)),
bottom_left=(1, 0)),
crs=dict(top_row=4326,
bottom_left=3857),
ax_inits=dict(bottom_right=(1, 1)),
width_ratios=(1, 2),
height_ratios=(2, 1))
# a map extending over the entire top-row of the grid (in epsg=4326)
mg.m_top_row.add_feature.preset.coastline()
# a map in the bottom left corner of the grid (in epsg=3857)
mg.m_bottom_left.add_feature.preset.ocean()
# an ordinary matplotlib axes in the bottom right corner of the grid
mg.ax_bottom_right.plot([1, 2, 3], marker="o")
mg.subplots_adjust(left=0.1, right=0.9, bottom=0.1, top=0.9)
Initialize a grid of Maps objects |
|
Join axis limits between all Maps objects of the grid (only possible if all maps share the same crs!) |
|
Share click events between all Maps objects of the grid |
|
Share pick events between all Maps objects of the grid |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
A collection of open-access WebMap services that can be added to the maps. |
|
Interface to features provided by NaturalEarth. |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
|
This will execute the corresponding action on ALL Maps objects of the MapsGrid! |
Naming conventions and autocompletion
The goal of EOmaps is to provide a comprehensive, yet easy-to-use interface.
To avoid having to remember a lot of names, a concise naming-convention is applied so that autocompletion can quickly narrow-down the search to relevant functions and properties.
Once a few basics keywords have been remembered, finding the right functions and properties should be quick and easy.
Note
EOmaps works best in conjunction with “dynamic autocompletion”, e.g. by using an interactive
console where you instantiate a Maps object first and then access dynamically updated properties
and docstrings on the object.
To clarify:
First, execute
m = Maps()in an interactive consolethen (inside the console, not inside the editor!) use autocompletion on
m.to get autocompletion for dynamically updated attributes.
For example the following accessors only work properly after the Maps object has been initialized
Maps.add_wmsbrowse available WebMap servicesMaps.set_classifybrowse available classification schemes
The following list provides an overview of the naming-conventions used within EOmaps:
Add features to a map - “m.add_”
All functions that add features to a map start with add_, e.g.:
Maps.add_feature,Maps.add_wms,Maps.add_annotation(),Maps.add_marker(),Maps.add_gdf(), …
WebMap services (e.g. Maps.add_wms) are fetched dynamically from the respective APIs.
Therefore the structure can vary from one WMS to another.
The used convention is the following:
You can navigate into the structure of the API by using “dot-access” continuously
once you reach a level that provides layers that can be added to the map, the
.add_layer.directive will be visibleany
<LAYER>returned by.add_layer.<LAYER>can be added to the map by simply calling it, e.g.:m.add_wms.OpenStreetMap.add_layer.default()m.add_wms.OpenStreetMap.OSM_mundialis.add_layer.OSM_WMS()
Set data specifications - “m.set_”
All functions that set properties of the associated dataset start with set_, e.g.:
Maps.set_data(),Maps.set_classify,Maps.set_shape, …
Create new Maps-objects - “m.new_”
Actions that result in a new Maps objects start with new_.
Maps.new_layer(),Maps.new_inset_map(), …
Callbacks - “m.cb.”
Everything related to callbacks is grouped under the cb accessor.
use
m.cb.<METHOD>.attach.<CALLBACK>()to attach pre-defined callbacks<METHOD>hereby can be one ofclick,pickorkeypress(but there’s no need to remember since autocompletion will do the job!).
use
m.cb.<METHOD>.attach(custom_cb)to attach a custom callback